Mecha, With position control, With speed control – Yaskawa Sigma-5 Large Capacity Users Manual: Design and Maintenance-Rotary Motors-Mechatrolink-III Communication Reference User Manual
Page 291
8.1 System Configuration and Connection Example for SERVOPACK with Fully-closed Loop Control
8-3
8
Fu
lly-close
d L
oop
Co
ntro
l
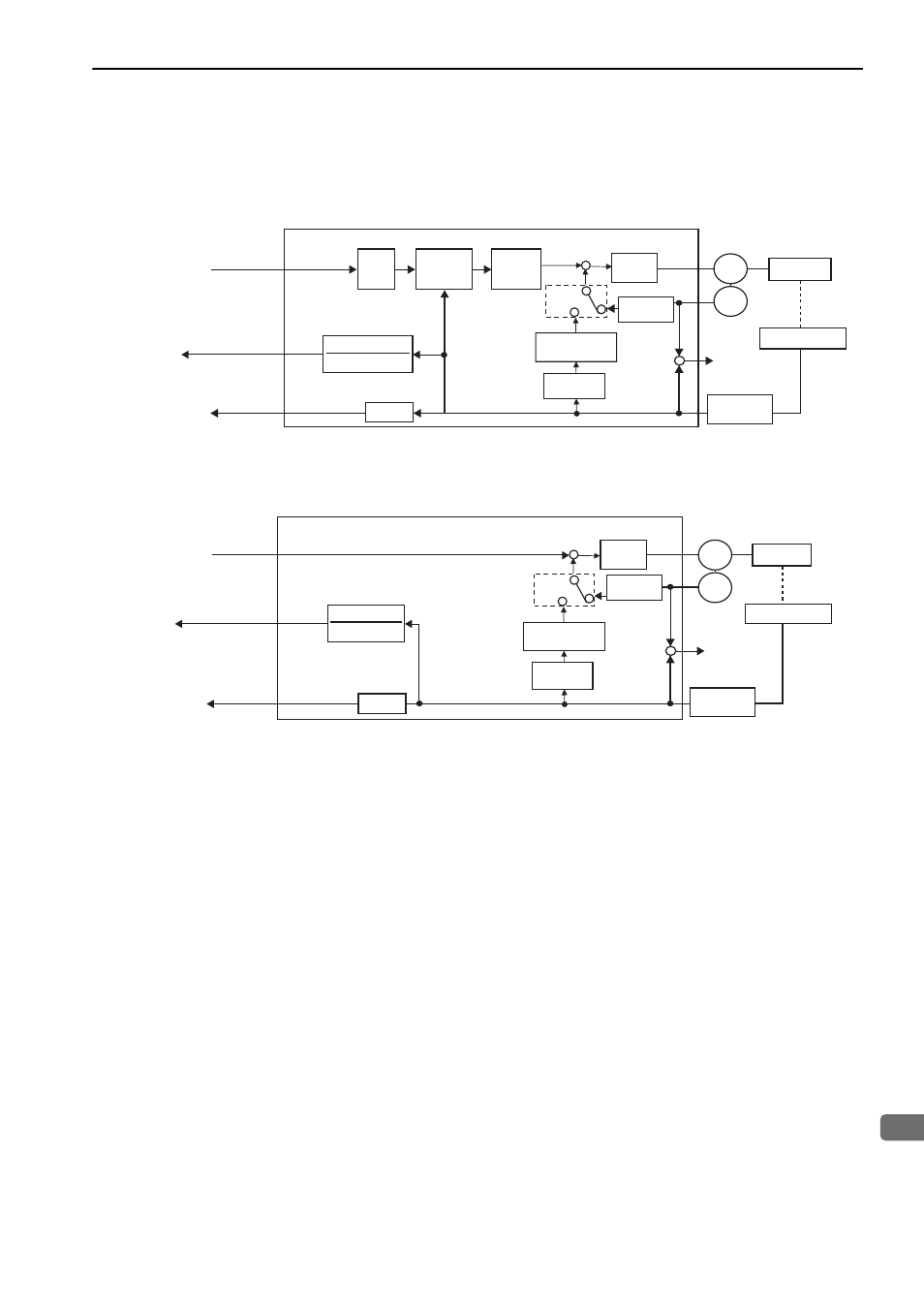
8.1.2 Internal Block Diagram of Fully-closed Loop Control
Internal block diagram of fully-closed loop control is shown below.
With Position Control
Note: Either an incremental or an absolute encoder can be used. When the absolute encoder is used, set 1 to Pn002.2 (use
the absolute encoder as an incremental encoder).
With Speed Control
Elec-
tronic
gear
MECHATROLINK
move command
Encoder
output
pulse
Error
counter
Speed
loop
Alarm
detection
Divider
Machine
SERVOPACK
Position
control
loop
Serial
conversion
Motor
A.d10
Encoder
External encoder
ޓ
Speed
conversion
Speed
feedback
Electronic gear
1
MECHATROLINK
Monitor data
㧙
Pn22A
㧗
Speed
conversion
Unit conversion
Pn20A
MECHA
SERVOPACK
Encoder
output
pulse
Divider
Speed
loop
Machine
Motor
Encoder
External encoder
ޓ
Speed
conversion
Speed feedback
Serial
conversion
MECHATROLINK
move command
Electronic gear
1
MECHATROLINK
monitor data
㧙
Pn22A
㧗
Speed
conversion
Unit conversion
Pn20A
Alarm
detection
A.d10
MECHA