About this manual, Description of technical terms – Yaskawa Sigma-5 Large Capacity Users Manual: Design and Maintenance-Rotary Motors-Mechatrolink-III Communication Reference User Manual
Page 3
iii
About this Manual
This manual describes information required for designing, testing, adjusting, and maintaining large-capacity
models of servo systems in the
Σ-V series.
Keep this manual in a location where it can be accessed for reference whenever required. Manuals outlined on
the following page must also be used as required by the application.
Differences between Large-capacity
Σ-V SERVOPACKs and Standard Σ-V
SERVOPACKs
The differences between the large-capacity
Σ-V SERVOPACKs and the standard Σ-V SERVOPACKs are
described below. Equipment damage may occur if these items are used or set incorrectly.
• CN1 Connector
The number of pins on the CN1 connector is different on a large-capacity
Σ-V SERVOPACK (50 pins) and
a standard
Σ-V SERVOPACK (26 pins).
If you are using both types of SERVOPACK, use the correct connector model numbers when ordering and
the correct signal assignments.
• Factory Settings of Parameters
The factory settings of the following parameters are different: Pn50A.3, Pn50B.0, and Pn511.0.
Make sure that you consider any differences in the factory settings if you copy the parameters from a stan-
dard
Σ-V SERVOPACK to a large-capacity Σ-V SERVOPACK.
For details, refer to 3.4.1 Input Signal Allocations.
• Monitor Displays
The monitor display digits are different for P-OT, N-OT, and /DEC.
Make sure you are reading the displays correctly when checking signal operation.
For details, refer to 7.3 Monitoring Input Signals.
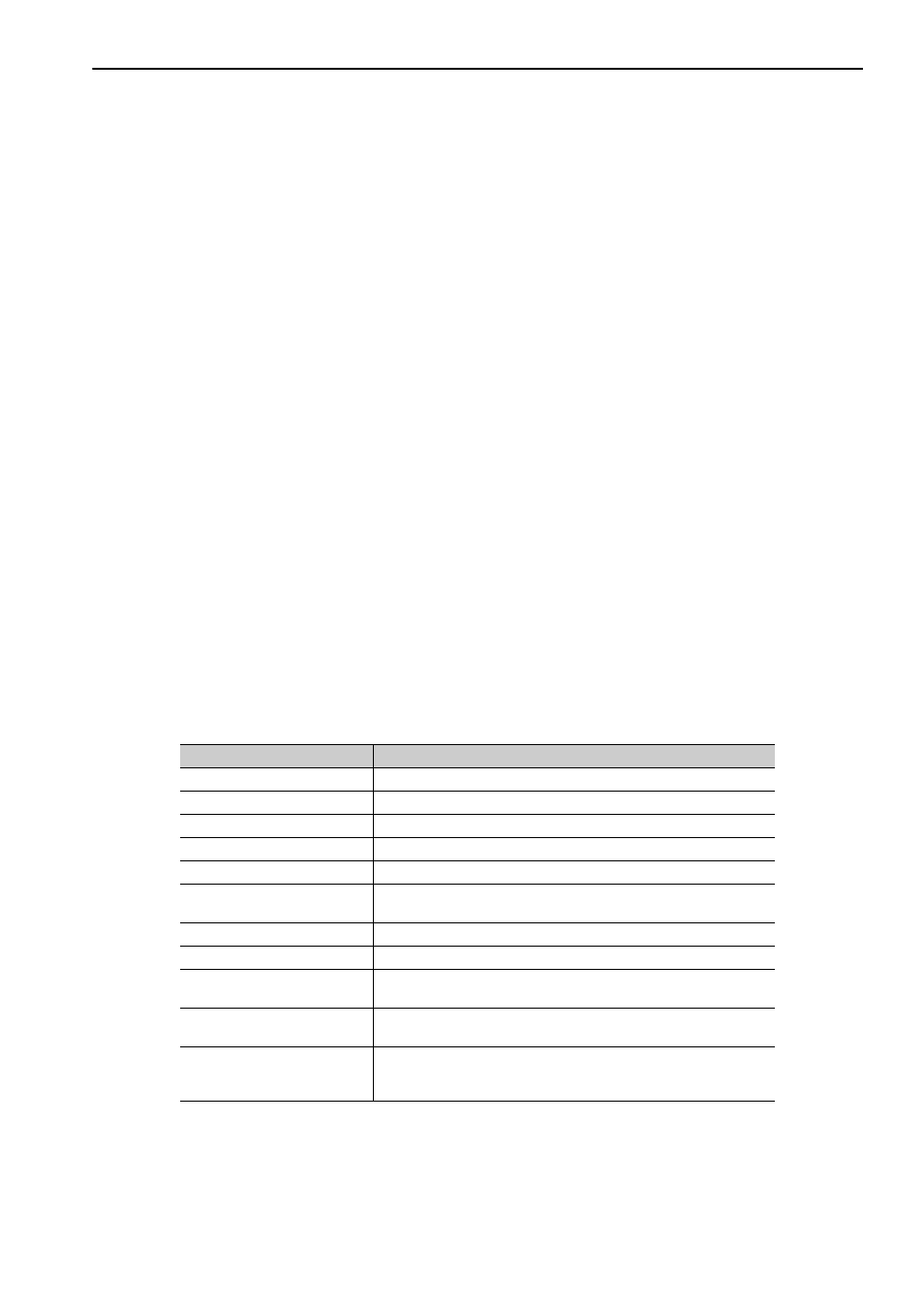
Description of Technical Terms
The following table shows the meanings of terms used in this manual.
Term
Meaning
Cursor
Input position indicated by Digital Operator
Servomotor
Σ-V large-capacity SGMVV servomotor
SERVOPACK
Σ-V large-capacity SGDV-
H, -
J servo amplifier
Converter
Σ-V large-capacity SGDV-COA converter
Servo Drive
A set that includes a servomotor, a SERVOPACK, and a converter
Servo System
A servo control system that includes the combination of a servo drive
with a host controller and peripheral devices
Servo ON
Power to motor ON
Servo OFF
Power to motor OFF
Base Block (BB)
Power supply to motor is turned OFF by shutting off the base current
to the power transistor in the SERVOPACK.
Servo Lock
A state in which the motor is stopped and is in position loop with a
position reference of 0.
Main Circuit Cable
Cables which connect to the main circuit terminals, including main
circuit power supply cables, control power supply cables, servomotor
main circuit cables, and others.