Yaskawa Sigma-5 Large Capacity Users Manual: Design and Maintenance-Rotary Motors-Mechatrolink-III Communication Reference User Manual
Page 384
10.1 List of Parameters
10-35
10
Ap
pend
ix
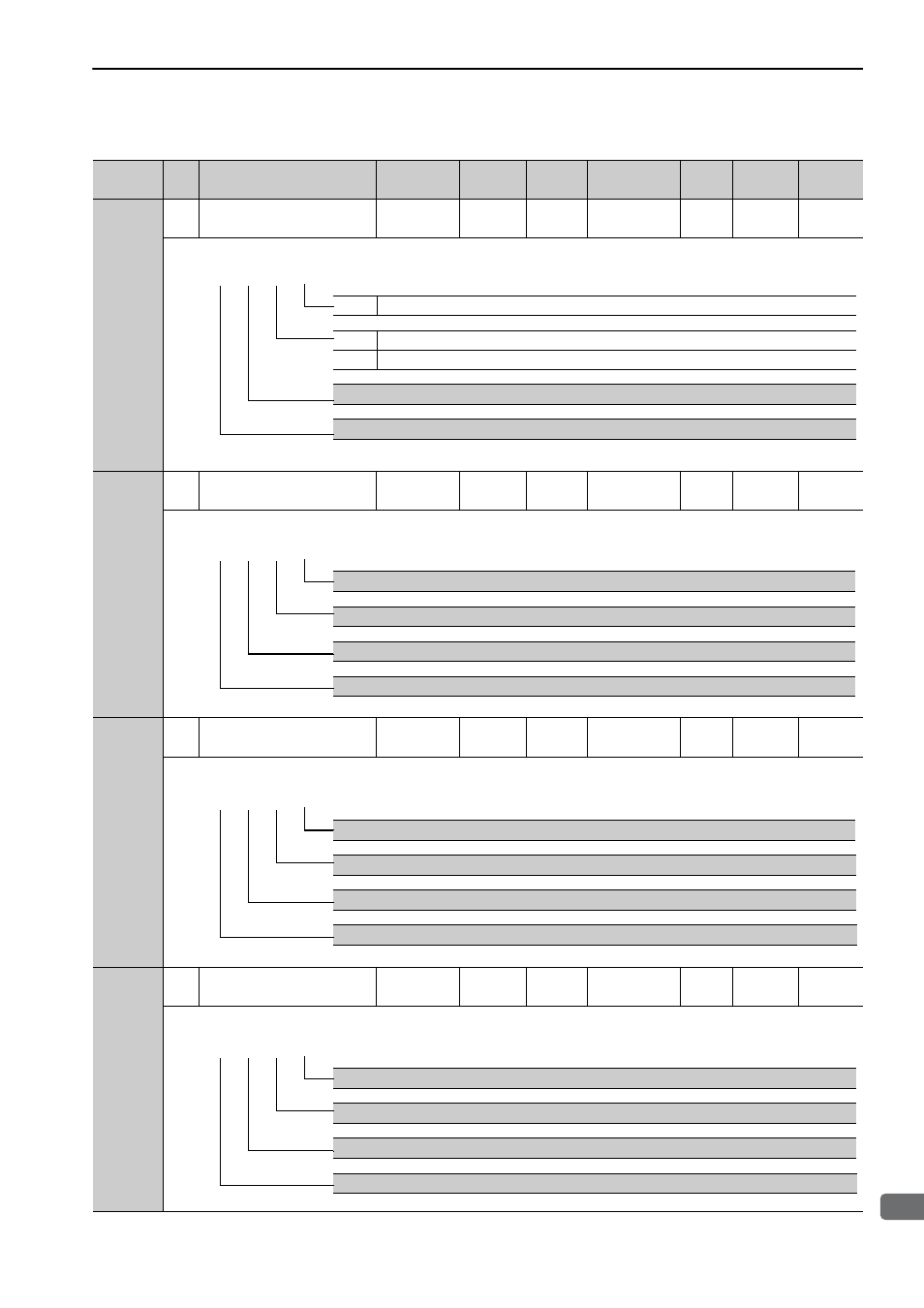
Pn863
2
SVCMD_IO (input signal
monitor) Allocation 4
0000 to 1717
–
0000
Immediately
Setup
M3
*10
–
Pn864
2
SVCMD_IO (input signal
monitor) Allocation 5
0000 to 1717
–
0000
Immediately
Setup
M3
*10
–
Pn865
2
SVCMD_IO (input signal
monitor) Allocation 6
0000 to 1717
–
0000
Immediately
Setup
M3
*10
–
Pn866
2
SVCMD_IO (input signal
monitor) Allocation 7
0000 to 1717
–
0000
Immediately
Setup
M3
*10
–
∗10. This parameter is enabled only for MECHATROLINK-III standard servo profile.
(cont’d)
Parameter
No.
Size
Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classi-
fication
Profile
Reference
Section
0 to 7
Bit position of CN1-46 input terminal monitor
0
Disables bit allocation for CN1-46 input terminal monitor.
1
Enables bit allocation for CN1-46 input terminal monitor.
Reserved (Do not change.)
Reserved (Do not change.)
4th 3rd 2nd 1st
digit digit digit digit
n.
Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
4th 3rd 2nd 1st
digit digit digit digit
n.
Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
4th 3rd 2nd 1st
digit digit digit digit
n.
Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
4th 3rd 2nd 1st
digit digit digit digit
n.