Information / diagnostic data (channel specific) – BECKHOFF EL7037 User Manual
Page 187
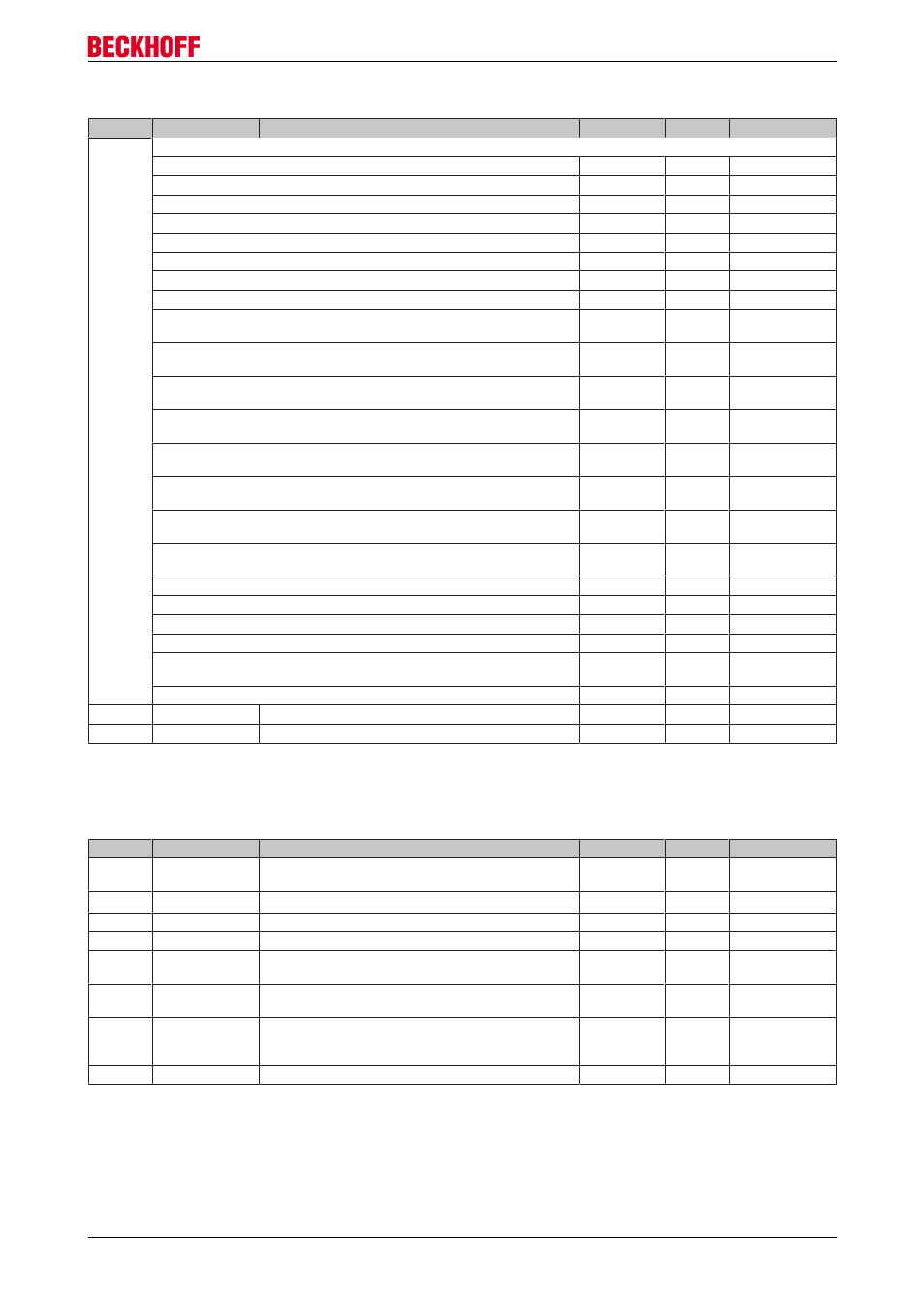
Configuration by means of the TwinCAT System Manager
Index 7020 POS Outputs Ch.1 (part 2)
Index
Name
Meaning
Data type
Flags
Default value
7020:22
Start type
0x0000 Idle: No travel command is being executed
UINT16
RO
0x0000 (0
dec
)
0x0001 Absolute: Absolute target position
UINT16
RO
0x0000 (0
dec
)
0x1001 Absolute (Change): Change during an active travel command
UINT16
RO
0x0000 (0
dec
)
0x0002 Relative: Target position relative to the current position
UINT16
RO
0x0000 (0
dec
)
0x1002 Relative (Change): Change during an active travel command
UINT16
RO
0x0000 (0
dec
)
0x0003 Endless plus: Endless driving in positive direction of rotation
UINT16
RO
0x0000 (0
dec
)
0x0004 Endless minus: Endless driving in negative direction of rotation
UINT16
RO
0x0000 (0
dec
)
0x0105 Modulo short: Shortest distance to the next modulo position
UINT16
RO
0x0000 (0
dec
)
0x0115 Modulo short extended: Shortest distance to the next modulo posi-
tion (without modulo window)
UINT16
RO
0x0000 (0
dec
)
0x0205 Modulo plus: Drive in positive direction of rotation to the next modulo
position
UINT16
RO
0x0000 (0
dec
)
0x0215 Modulo plus extended: Drive in positive direction of rotation to the
next modulo position (without modulo window)
UINT16
RO
0x0000 (0
dec
)
0x0305 Modulo minus: Drive in negative direction of rotation to the next
modulo position
UINT16
RO
0x0000 (0
dec
)
0x0315 Modulo minus extended: Drive in negative direction of rotation to the
next modulo position (without modulo window)
UINT16
RO
0x0000 (0
dec
)
0x0405 Modulo current: Drive in the last implemented direction of rotation to
the next modulo position
UINT16
RO
0x0000 (0
dec
)
0x0415 Modulo current extended: Drive in the last implemented direction of
rotation to the next modulo position (without modulo window)
UINT16
RO
0x0000 (0
dec
)
0x0006 Additive: New target position relative/additive to the last target posi-
tion
UINT16
RO
0x0000 (0
dec
)
0x1006 Additive (Change): Change during an active travel command
UINT16
RO
0x0000 (0
dec
)
0x6000 Calibration, PLC cam: Calibration with cam
UINT16
RO
0x0000 (0
dec
)
0x6100 Calibration, HW sync: Calibration with cam and C-track
UINT16
RO
0x0000 (0
dec
)
0x6E00 Calibration, set manual: Set calibration manually
UINT16
RO
0x0000 (0
dec
)
0x6E01 Calibration, set manual auto: Set automatic calibration, for "Enable =
1"
UINT16
RO
0x0000 (0
dec
)
0x6F00 Calibration, clear manual: Clear calibration manually
UINT16
RO
0x0000 (0
dec
)
7020:23
Acceleration
Acceleration specification
UINT16
RO
0x0000 (0
dec
)
7020:24
Deceleration
Deceleration specification
UINT16
RO
0x0000 (0
dec
)
Information / diagnostic data (channel specific)
Index 9010 STM Info data Ch.1
Index
Name
Meaning
Data type
Flags
Default value
9010:0
STM Info data
Ch.1
Maximum subindex
UINT8
RO
0x13 (19
dec
)
9010:01
Status word
188])
UINT16
RO
0x0000 (0
dec
)
9010:08
Motor velocity
Current motor velocity
INT16
RO
0x0000 (0
dec
)
9010:09
Internal position
Internal position (micro increments)
UINT32
RO
0x00000000 (0
dec
)
9010:0B
Motor load
Current motor load
Unit: 0.01°
INT16
RO
0x0000 (0
dec
)
9010:0D
Motor dc current
Current motor current (DC vector)
Unit: 1 mA
INT16
RO
0x0000 (0
dec
)
9010:0E
Tn (curr.)
Internally calculated time constant of the current con-
troller
Unit: 0.01 ms
UINT16
RO
0x0000 (0
dec
)
9010:13
External position
External position (connected encoder)
UINT32
RO
0x00000000 (0
dec
)
EL70x7
187
Version 1.0