Output data – BECKHOFF EL7037 User Manual
Page 162
Configuration by means of the TwinCAT System Manager
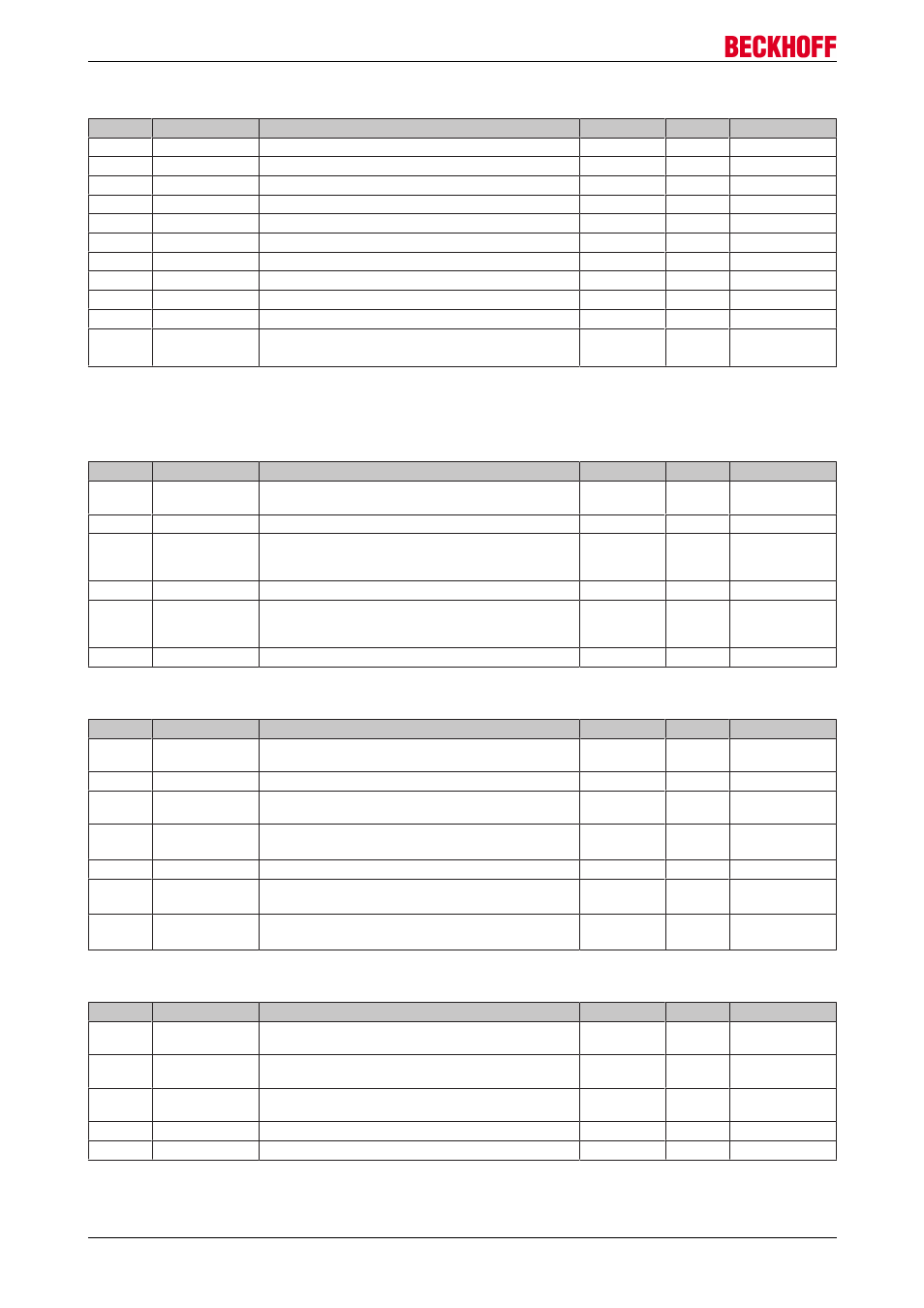
Index 6020 POS Inputs Ch.1
Index
Name
Meaning
Data type
Flags
Default value
6020:0
POS Inputs Ch.1
Maximum subindex
UINT8
RO
0x22 (34
dec
)
6020:01
Busy
A current travel command is active
BOOLEAN
RO
0x00 (0
dec
)
6020:02
In-Target
Motor has arrived at target
BOOLEAN
RO
0x00 (0
dec
)
6020:03
Warning
A warning has occurred
BOOLEAN
RO
0x00 (0
dec
)
6020:04
Error
an error has occurred
BOOLEAN
RO
0x00 (0
dec
)
6020:05
Calibrated
Motor is calibrated
BOOLEAN
RO
0x00 (0
dec
)
6020:06
Accelerate
Motor is in the acceleration phase
BOOLEAN
RO
0x00 (0
dec
)
6020:07
Decelerate
Motor is in the deceleration phase
BOOLEAN
RO
0x00 (0
dec
)
6020:11
Actual position
Current target position of the travel command generator
UINT32
RO
0x00000000 (0
dec
)
6020:21
Actual velocity
Current set velocity of the travel command generator
INT16
RO
0x0000 (0
dec
)
6020:22
Actual drive time
Travel command time information (see subindex 8021:11
[
UINT32
RO
0x00000000 (0
dec
)
Output data
Index 7000 ENC Outputs Ch.1
Index
Name
Meaning
Data type
Flags
Default value
7000:0
ENC Outputs
Ch.1
Maximum subindex
UINT8
RO
0x11 (17
dec
)
7000:01
Enable latch C
Activate latching via the C-track.
BOOLEAN
RO
0x00 (0
dec
)
7000:02
Enable latch ex-
tern on positive
edge
Activate external latch with positive edge.
BOOLEAN
RO
0x00 (0
dec
)
7000:03
Set counter
Set the counter value.
BOOLEAN
RO
0x00 (0
dec
)
7000:04
Enable latch ex-
tern on negative
edge
Activate external latch with negative edge.
BOOLEAN
RO
0x00 (0
dec
)
7000:11
Set counter value This is the counter value to be set via "Set counter".
UINT32
RO
0x00000000 (0
dec
)
Index 7010 STM Outputs Ch.1
Index
Name
Meaning
Data type
Flags
Default value
7010:0
STM Outputs
Ch.1
Maximum subindex
UINT8
RO
0x21 (33
dec
)
7010:01
Enable
activates the output stage
BOOLEAN
RO
0x00 (0
dec
)
7010:02
Reset
all errors that may have occurred are reset by setting this
bit (rising edge)
BOOLEAN
RO
0x00 (0
dec
)
7010:03
Reduce torque
Reduced torque (coil current) is active (see subindex
8010:02 [
BOOLEAN
RO
0x00 (0
dec
)
7010:0C
Digital output 1
Digital output 1
BOOLEAN
RO
0x00 (0
dec
)
7010:11
Position
Set position specification
Unit: Increments [
UINT32
RO
0x00000000 (0
dec
)
7010:21
Velocity
Set velocity specification
Unit: +/- 32767 corresponds to +/- 100% [
INT16
RO
0x0000 (0
dec
)
Index 7020 POS Outputs Ch.1 (part 1)
Index
Name
Meaning
Data type
Flags
Default value
7020:0
POS Outputs
Ch.1
Maximum subindex
UINT8
RO
0x24 (33
dec
)
7020:01
Execute
Start travel command (rising edge), or prematurely abort
travel command (falling edge)
BOOLEAN
RO
0x00 (0
dec
)
7020:02
Emergency Stop
Prematurely abort travel command with an emergency
ramp (rising edge)
BOOLEAN
RO
0x00 (0
dec
)
7020:11
Target position
Specification of the target position
UINT32
RO
0x00000000 (0
dec
)
7020:21
Velocity
Specification of the maximum set velocity
INT16
RO
0x0000 (0
dec
)
EL70x7
162
Version 1.0