BECKHOFF EL7037 User Manual
Page 144
Commissioning
Target overrun:
In the case of a dynamic change of the target position, the change may take place at a relatively late point in
time. The consequence of this may be that a change in the direction of rotation is necessary and that the
new target position may be overrun. “Target overrun” is set if this occurs.
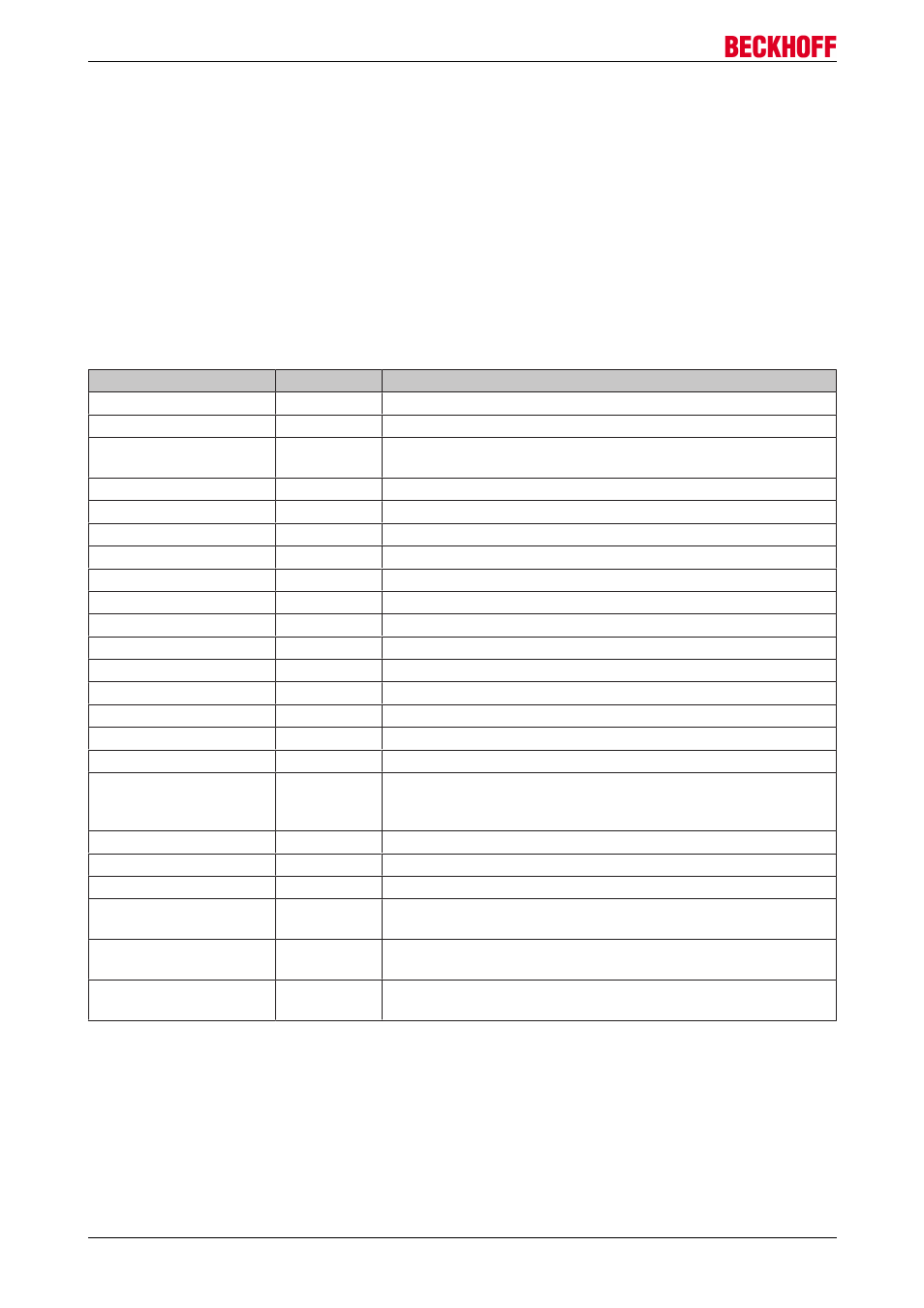
States of the internal state machine
States of the internal state machine
The state (drive controller) (Index 9020:03 [
188]) provides information about the current state of the internal
state machine. For diagnostic purposes this can be read out by the PLC for the propagation delay. The
internal cycle works constantly with 250 µs. A connected PLC cycle is very probably slower (e.g. 1 ms). For
this reason it may be the case that some states are not visible at all in the PLC, since these will sometimes
run through only one internal cycle.
Name
ID
Description
INIT
0x0000
Initialisation/preparation for the next travel command
IDLE
0x0001
Wait for the next travel command
START
0x0010
The new command is evaluated and the corresponding
calculations are performed
ACCEL
0x0011
Acceleration phase
CONST
0x0012
Constant phase
DECEL
0x0013
Deceleration phase
EMCY
0x0020
An “Emergency stop” has been triggered
STOP
0x0021
The motor has stopped
CALI_START
0x0100
Start of a calibration command
CALI_GO_CAM
0x0110
The motor is being driven towards the cam
CALI_ON_CAM
0x0111
The cam has been reached
CALI_GO_SYNC
0x0120
The motor is being driven in the direction of the HW sync pulse
CALI_LEAVE_CAM
0x0121
The motor is being driven away from the cam
CALI_STOP
0x0130
End of the calibration phase
CALIBRATED
0x0140
The motor is calibrated
NOT_CALIBRATED
0x0141
The motor is not calibrated
PRE_TARGET
0x1000
The set position has been reached; the position controller “pulls”
the motor further into the target; “In-Target timeout” is started
here
TARGET
0x1001
The motor has reached the target window within the timeout
TARGET_RESTART
0x1002
A dynamic change of the target position is processed here
END
0x2000
End of the positioning phase
WARNING
0x4000
A warning state occurred during the travel command; this is
processed here
ERROR
0x8000
An error state occurred during the travel command; this is
processed here
UNDEFINED
0xFFFF
Undefined state (can occur, for example, if the driver stage has
no control voltage)
States of the internal state machine
Standard sequence of a travel command
Standard sequence of a travel command
The “normally” sequence of a travel command is shown in the following flow diagram.
Coarse distinction is made between these four stages:
EL70x7
144
Version 1.0