BECKHOFF EL7037 User Manual
Page 147
Commissioning
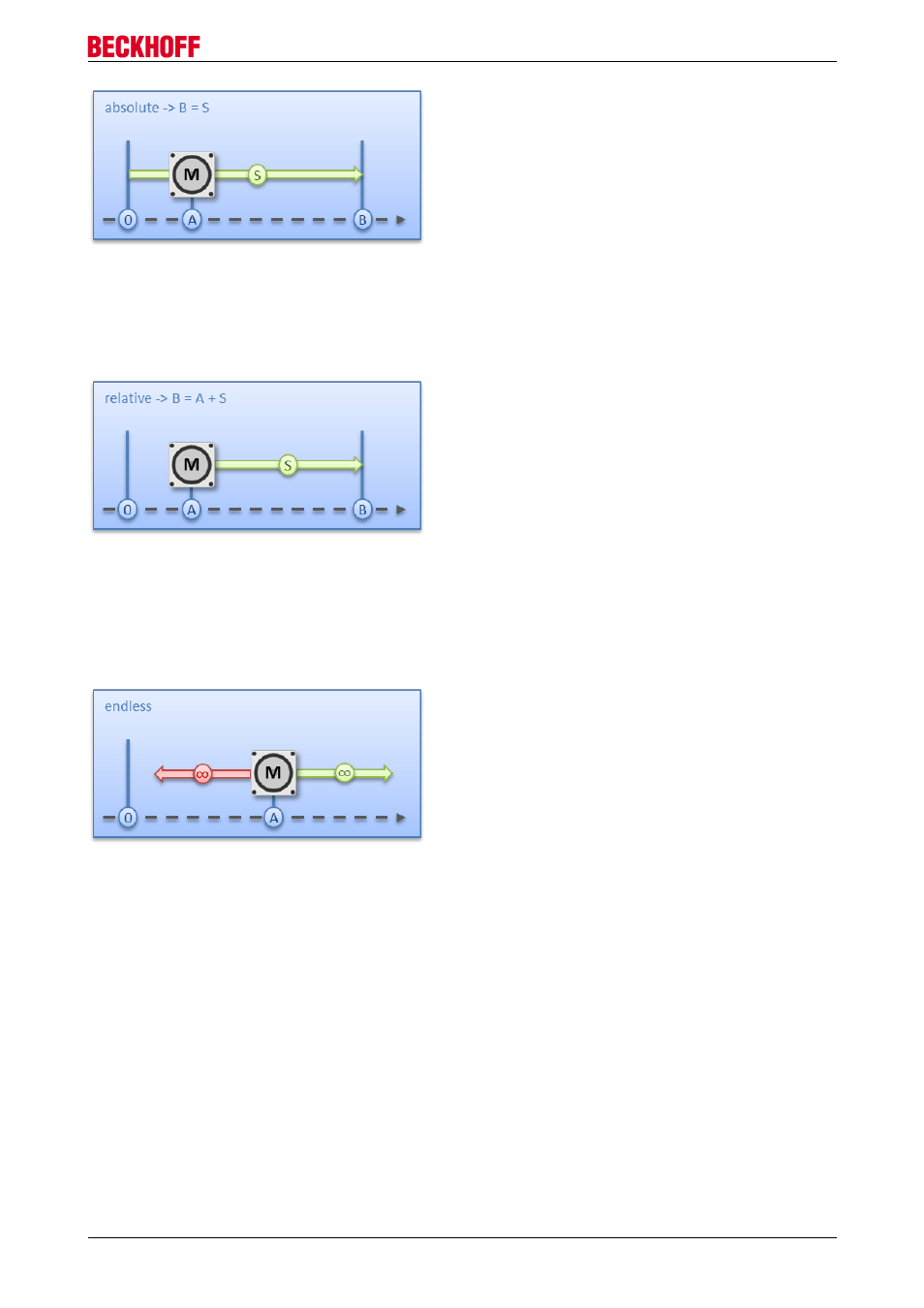
Fig. 167: Absolute positioning
RELATIVE:
In relative positioning, the user specifies a position delta S, which is added to the current position A,
producing the target position B.
Fig. 168: Relative positioning
ENDLESS_PLUS / ENDLESS_MINUS:
The two start types “ENDLESS_PLUS” and “ENDLESS_MINUS” offer the possibility in the “Positioning
interface” to specify a direct motor velocity in order to travel endlessly in the positive or negative direction
with the specified accelerations.
Fig. 169: Endless travel
ADDITIVE:
For additive positioning, the position delta S specified by the user is added to the target position E used for
the last travel command in order to calculate the target position B.
This kind of positioning resembles the relative positioning, but there is a difference. If the last travel
command was completed successfully, the new target position is the same. If there was an error, however,
be it that the motor entered a stall state or an “Emergency stop” was triggered, the current position is
arbitrary and not foreseeable. The user now has the advantage that he can use the last target position for
the calculation of the following target position.
EL70x7
147
Version 1.0