3 position controller – BECKHOFF EL7037 User Manual
Page 128
Commissioning
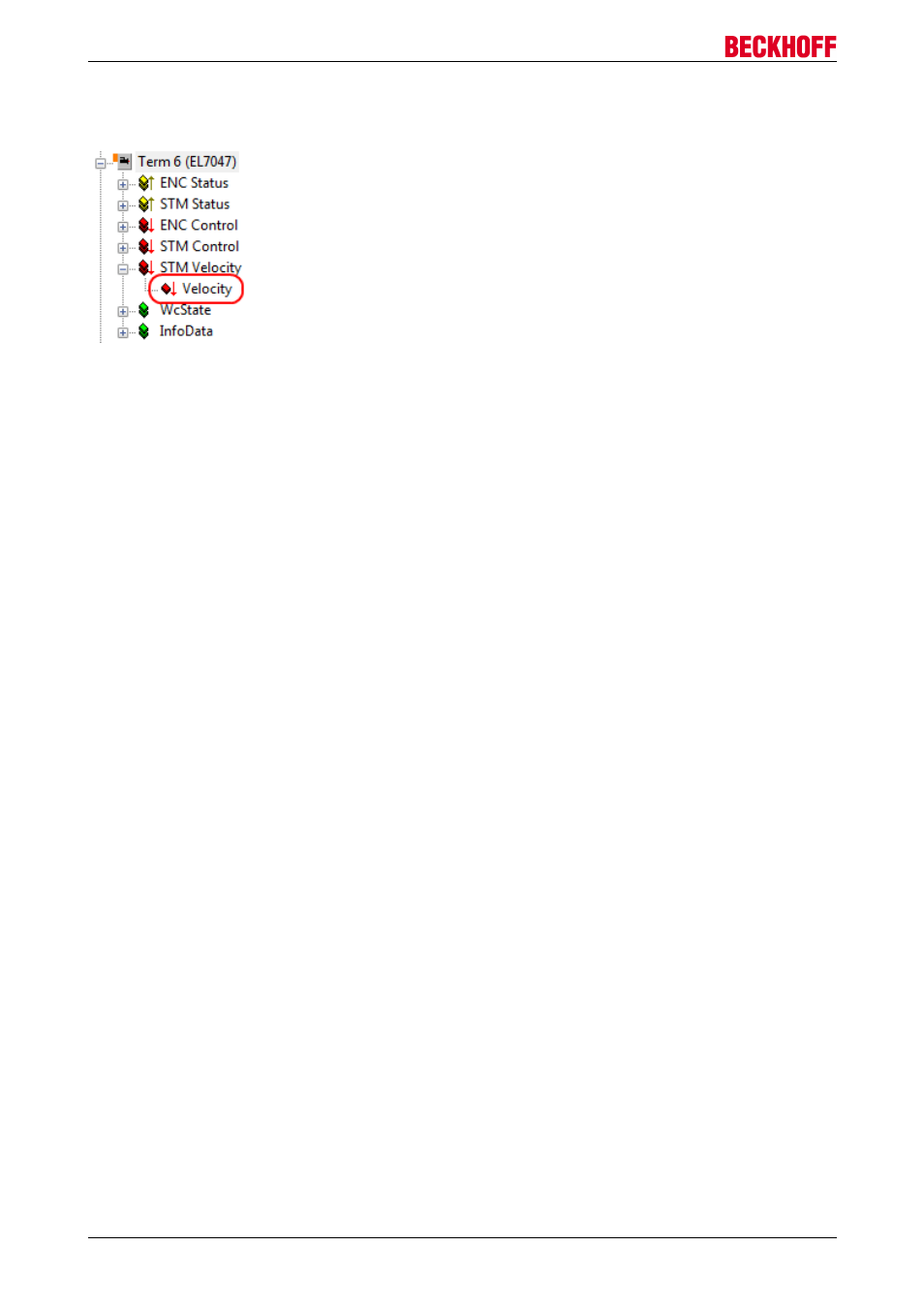
• A defined velocity can be entered via the cyclic variable STM velocity (Fig. "Entering the velocity").
The speed is specified in % of the speed range (index 8012:05 [
corresponds to 100%, the value -32767 corresponds to -100%.
Fig. 142: Entering the velocity
5.4.3
Position controller
In Position controller mode, the EL70x7 operates in the cyclical position interface. A defined position can be
set via the STM Position variable.
Notes
• This mode can be used with a connected encoder or with the internal counter (without encoder).
• The process data can be transferred with TwinCAT NC or directly from the PLC (Positioning interface).
• Third-party motors are supported
Step by Step
• Add the terminal to the configuration as described in the section TwinCAT configuration settings –
66] or – Online scan [
72].
• Link the terminal with the NC as described in section Integration into the NC configuration [
TwinCAT NC is used).
• Configure the EL70x7
◦ automatically - import the XML motor file into the startup directory as described in section Set-
tings in the CoE - automatic [
◦ manually - configure the parameters as described in section Settings in the CoE - manual
105].
• Set the operating mode in the CoE directory to Position controller [
181], Fig. "Position controller
mode".
EL70x7
128
Version 1.0