Kipp&Zonen Brewer MkIII User Manual
Page 124
MKIII OPERATOR’S MANUAL
121
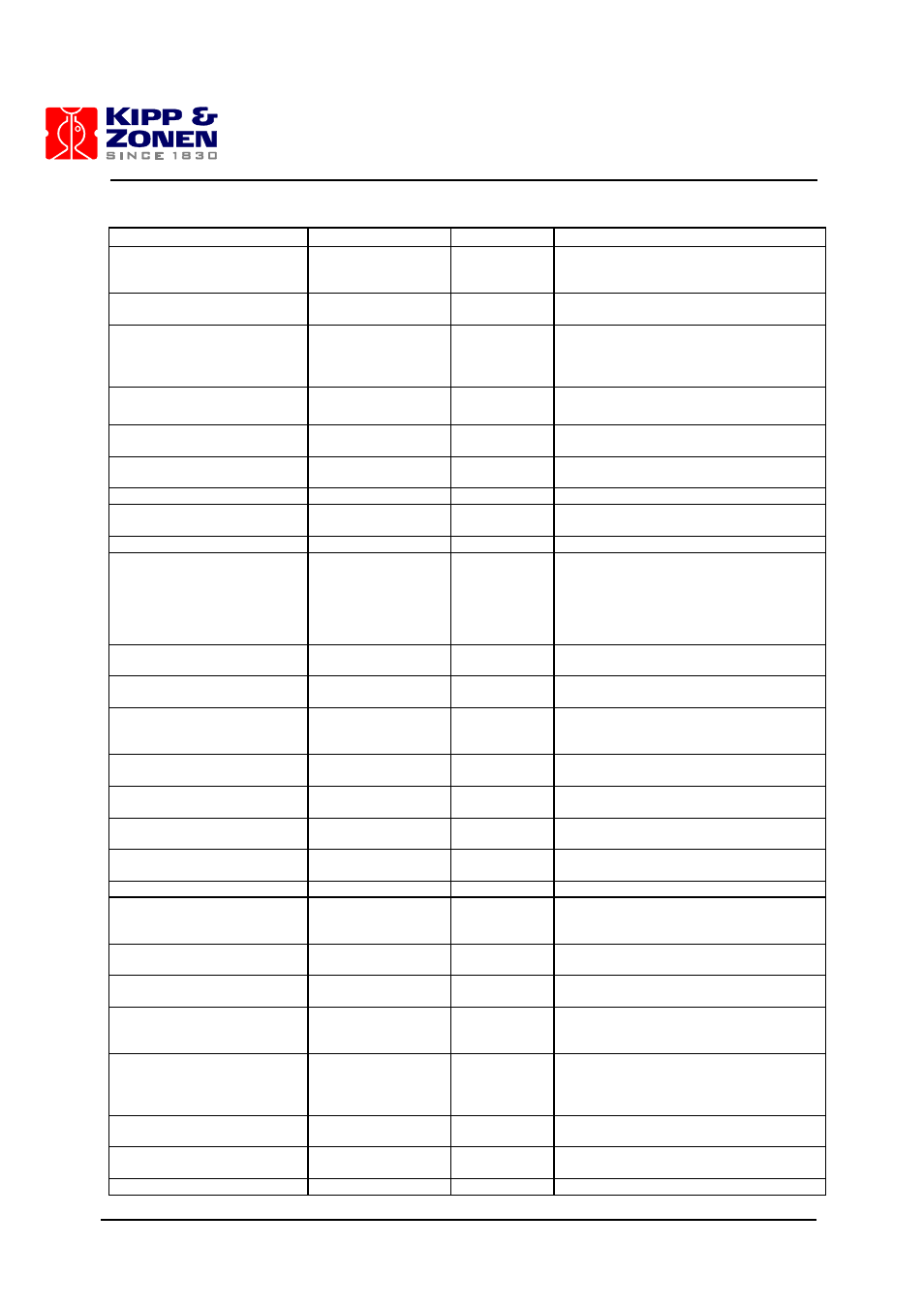
The
format of
Effective
meaning of
BREWER.ID
integer value (0-65536)
next warm start
or USECONFIG
This is the Brewer ID used to manage
multidrop protocol. Copied to NVRAM on
initialization.
CLOSE.TIME
Float seconds
Immediate
number of seconds before the PMT window
closes when we start to move the slitmask
IMMINENT
float seconds
Immediate
number of seconds before the PMT window
closes that we should start to watch PMT
window closely so we move the motor at the
proper time
LAMP.RESET.TIME
float seconds
Next time lamp
is turned on
The amount of time before the lamp will be
automatically turned off.
LAMP.CONV.CURRENT
[
float amps
Immediate
conversion constant for lamp current as
measured at A/D
LAMP.CONV.VOLTAGE
[
float volts
Immediate
conversion constant for lamp voltage as
measured at A/D
MODEL
unsigned integer
immediate
the 'mark' number of the brewer
MOISTURE.LIMIT
float grams/cubic
meter
on reset
Permitted maximum in watermark recording
of moisture content inside the Brewer.
MOTOR.ADDRESS [
Identifies the 751 used to talk to this motor
MOTOR.CLASS [
one of:
NOMOTOR
MICROMOTOR
TRACKERMOTOR
STANDARDMOTOR
SENSORLESSMOTOR
Immediate
The type of motor at this motorId and hence
the algorithm used to initialize it.
MOTOR.INITIAL[
Signed integer steps Immediate
position of motor from step 0 after
initialization
MOTOR.MAX.ACC [
Unsigned integer
paces/(256*tick)
2
on reset
maximum absolute value of motor
acceleration to be permitted
MOTOR.MAX.JERK [
Unsigned integer
paces/(256*tick)
3
on reset
maximum absolute value of rate of change of
motor acceleration to be permitted inside a
time slice
MOTOR.MAX.SEARCH
[
Signed integer paces on reset
max number of paces before search stopped
MOTOR.MAX.VEL[
Unsigned integer
paces/(256*tick)
on reset
maximum absolute value of motor velocity to
be permitted
MOTOR.MAX.POS [
maximum value of motor position to be
permitted
MOTOR.MIN.POS [
Signed integer paces on reset
minimum value of motor position to be
permitted
MOTOR.ORIGIN [
Signed integer paces on reset
position of step 0 after initialization
MOTOR.REF.PLAY [
uncertainty of position of motor with respect
to reference sensor when sensor is detected
at high speed and arbitrary direction.
MOTOR.RESET.POS[
position of motor to be paced at before
commencing motor init to ref sensor
MOTOR.SLOPE [
signed integer
paces/step
Immediate
number of paces to a step (see M command)
MOTOR.SLOW.VEL [
unsigned integer
paces/(256*tick)
during motor init
value of motor velocity to be permitted during
final approach of search. If equal to max vel
init routine is shortened.
MOTOR.STOP.METHOD
[
int one of
1, 3 none
0 reduced
2 full
on reset
power applied for stopped motor
MOTOR.TIME.OUT [
Immediate
amount of time that a motor is given to
complete movement before timing out.
OPEN.TIME
float seconds
Immediate
number of seconds after PMT window closes
before we open the PMT window
PMT.WINDOW.RESOLUTION
float seconds
Immediate
seconds in a window timing tick
APPENDIX H COMPUTER / BREWER INTERFACE (TELETYPE)