3 erc – ADLINK PCI-8134A User Manual
Page 64
54
• Operations
any command pulse. The ALM signal may be a pulse signal, of which the
shortest width is a time length of 5 micro seconds.
You can change the input logic by set_alm_logic() function. Whether or not
the PCI-8134/PCI-8134A is generating pulses, the ALM signal lets it output
the INT signal.. The ALM status can be monitored by software function:
get_io_status(). The ALM signal can generate IRQ by setting the bit 2 of
INT. factor in software function: set_int_factor().
4.2.3
ERC
The deviation counter clear signal is inserted in the following 4 situations:
(1) home return is complete;
(2) the end-limit switch is active;
(3) an alarm signal stops OUT and DIR signals;
(4) an emergency stop command is issued by software operator.
Since the servomotor operates with some delay from pulse generated from
the PCI-8134/PCI-8134A, it keeps operating by responding to the position
error remaining in the deviation counter of the driver if the
±EL signal or the
completion of home return stops the PCL5023 from outputting pulses. The
ERC signal allows you to immediately stop the servomotor by resetting the
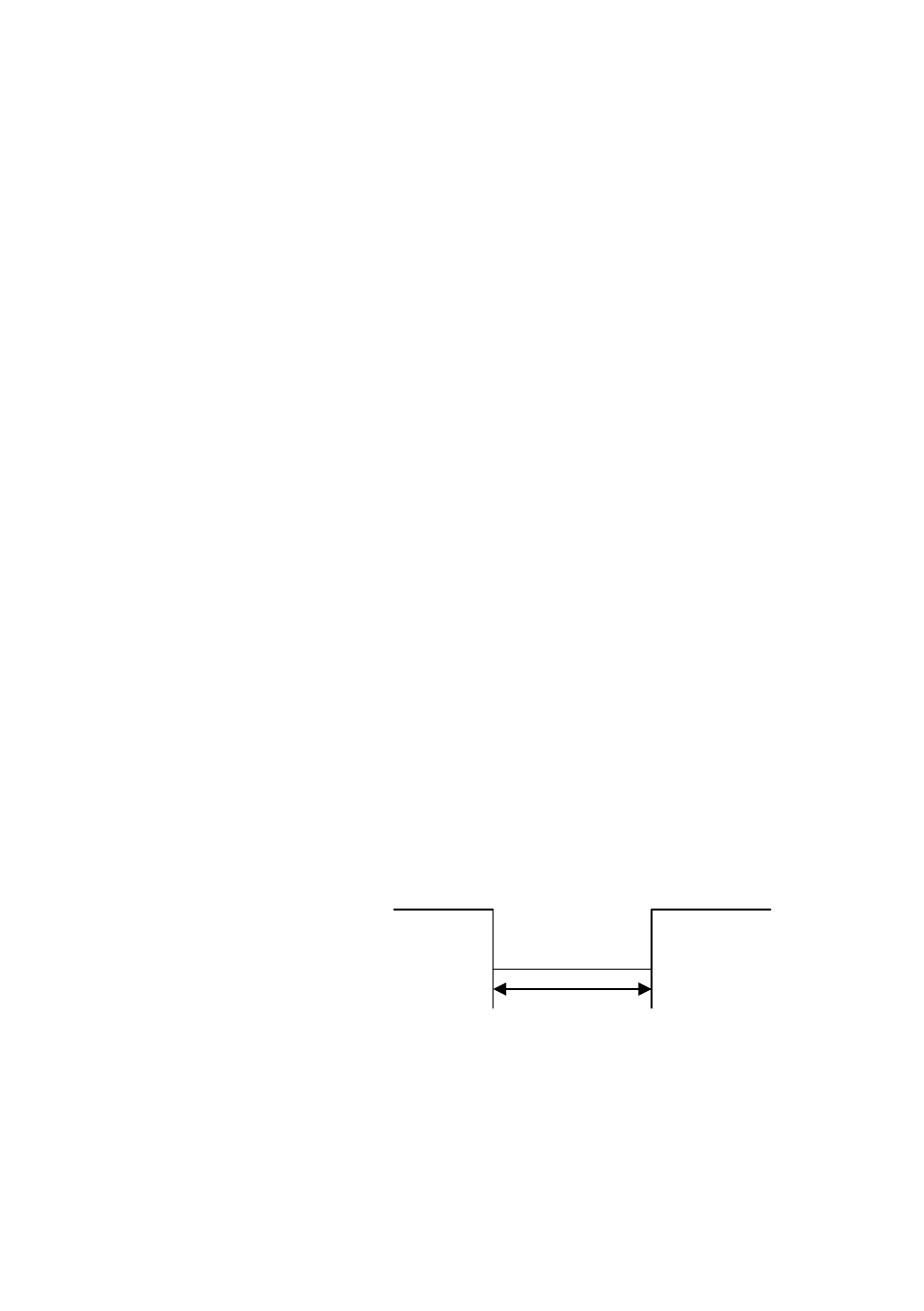
deviation counter to zero. The ERC signal is output as an one-shot signal.
The pulsewidth is a time length of 10ms. The ERC signal will automatically
output when
±EL signals, ALM signal is turned on to immediately stop the
servomotor. User can set the ERC pin output enable/disable by
set_erc_enable() function. ERC pin output is set output enabled when
initializing.
OFF
ON
ERC Output
Approximate 10ms