2 constant velocity motion, Constant velocity motion – ADLINK PCI-8134A User Manual
Page 43
Operations
• 33
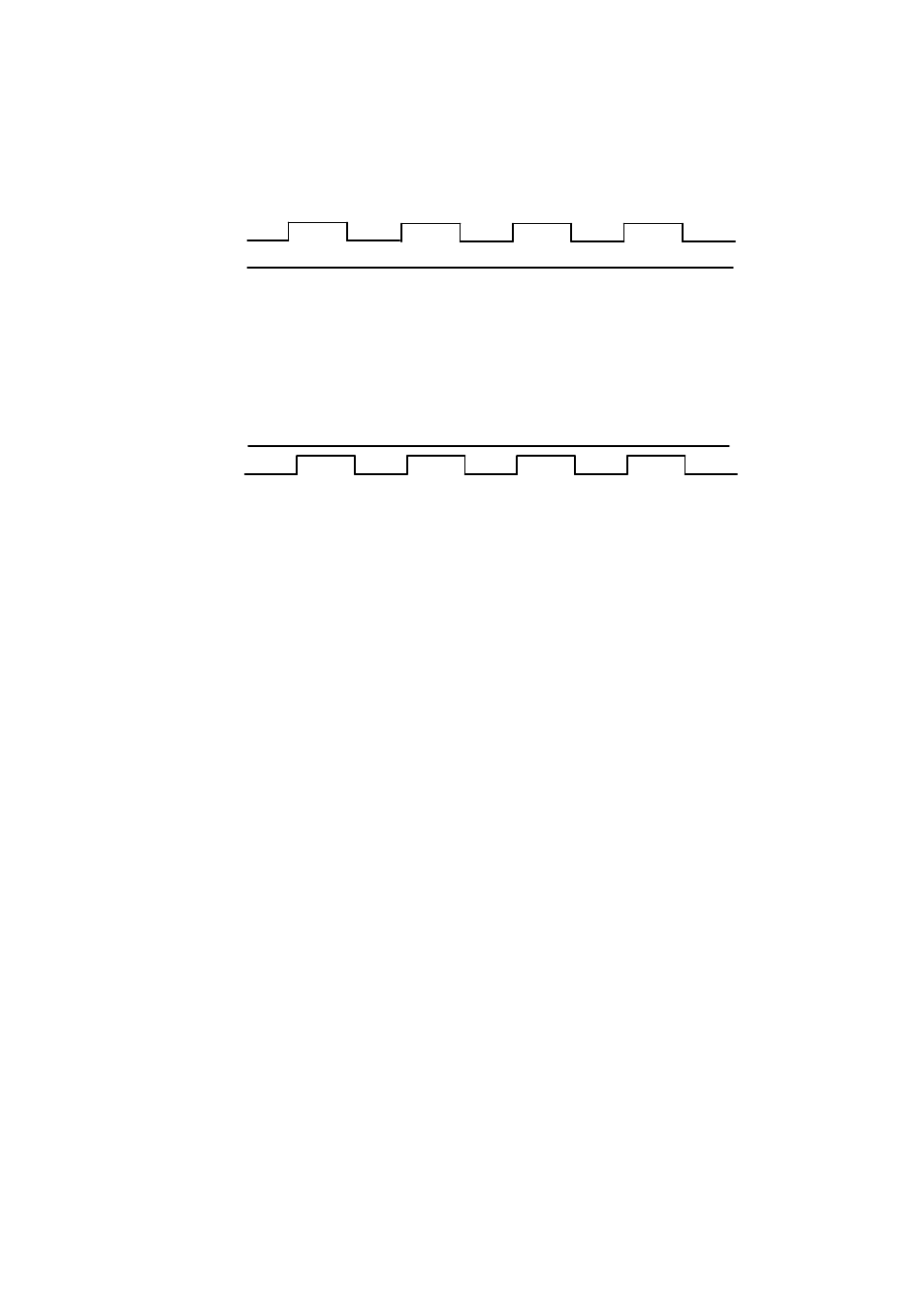
following diagram shows the output waveform of positive (plus,+) command
and negative (minus,-) command.
Relative Function:
set_pls_optmode(): Refer to section 6.4
4.1.2
Constant Velocity Motion
This mode is used to operate one axis motor at constant velocity motion.
The output pulse accelerates from a starting velocity (str_vel) to the
specified constant velocity (max_vel). The v_move() function is used to
accelerate constantly while the sv_move() function is to accelerate
according to S-curve (constant jerk). The pulse output rate will keep at
maximum velocity until another velocity command is set or stop command is
issued. The v_change() is used to change speed during moving. The
v_stop() function is used to decelerate the motion to zero velocity (stop).
The velocity profile is shown as following. Note that v_stop() function can
be also be applied to stop outputting command pulses during Preset Mode
(both trapezoidal and S-curve Motion) , Home Mode or Manual Pulser
Mode operations.
Relative Functions:
v_move( ), v_stop( ), sv_move(): Refer to section 6.5
OUT
DIR
Negative Command
OUT
DIR
Positive Command