ADLINK PCI-8134A User Manual
Page 53
Operations
• 43
•
Home point is at the first edge of ORG signal when home move executing.
At left or right side of edge depends on home move direction.
•
If axis is not at ORG, the axis will search the edge of ORG as home point.
•
In Case 1, the axis is stopped immediately when motion detected the
edge of ORG signal but it might stop at anywhere within the range of
ORG signal that means the home position is inaccurate after home move
function was executed many times.
•
The feedback counter of PCI-8134 will be reset to zero while the motion
is hitting the edge of ORG signal.
•
In Case 2, the axis will stand still and reset counter to 0 and issue home
interrupt.
•
After normal home finished like case 1, users have to copy to position
value to command counter and target position counter at the same time.
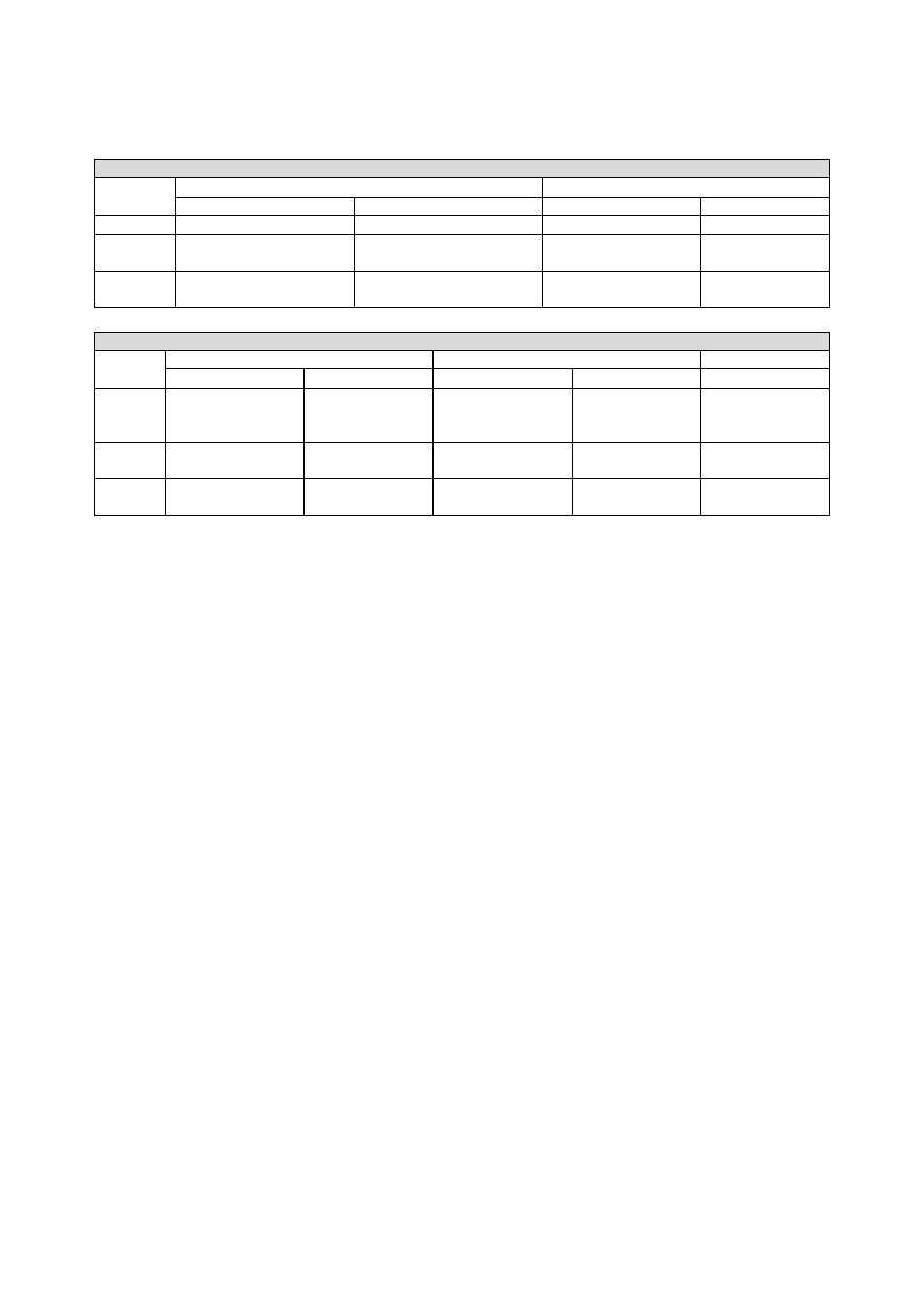
While the motion hits the edge of ORG or EL
set_cnt_src()=0 (internal)
set_cnt_src ()=1 (external)
get_command()
get_position()
get_command()
get_position()
Case 1
Doesn’t change
Reset to 0
Doesn’t change
Reset to 0
Case 2
Doesn’t change
Reset to 0 (stand still)
Doesn’t change
Reset to 0
(stand still)
Case 3
Doesn’t change
Stop at a EL position
Doesn’t change
Stop at a EL
position
Counter status after Home Move Completed (Motion Done)
set_cnt_src()=0 (internal)
set_cnt_src ()=1 (external)
Interrupt?
get_command()
get_position()
get_command()
get_position()
Case
1
Doesn’t change
Remain 0
Doesn’t change
Stop at a
deceleration
position
Home Int
Case
2
Doesn’t change
Reset to 0
Doesn’t change
Reset to 0
Home Int
Case
3
Doesn’t change
Stop at a EL
position
Doesn’t change
Stop at a EL
position
EL Int