5 linear interpolated motion, Linear interpolated motion – ADLINK PCI-8134A User Manual
Page 50
40
• Operations
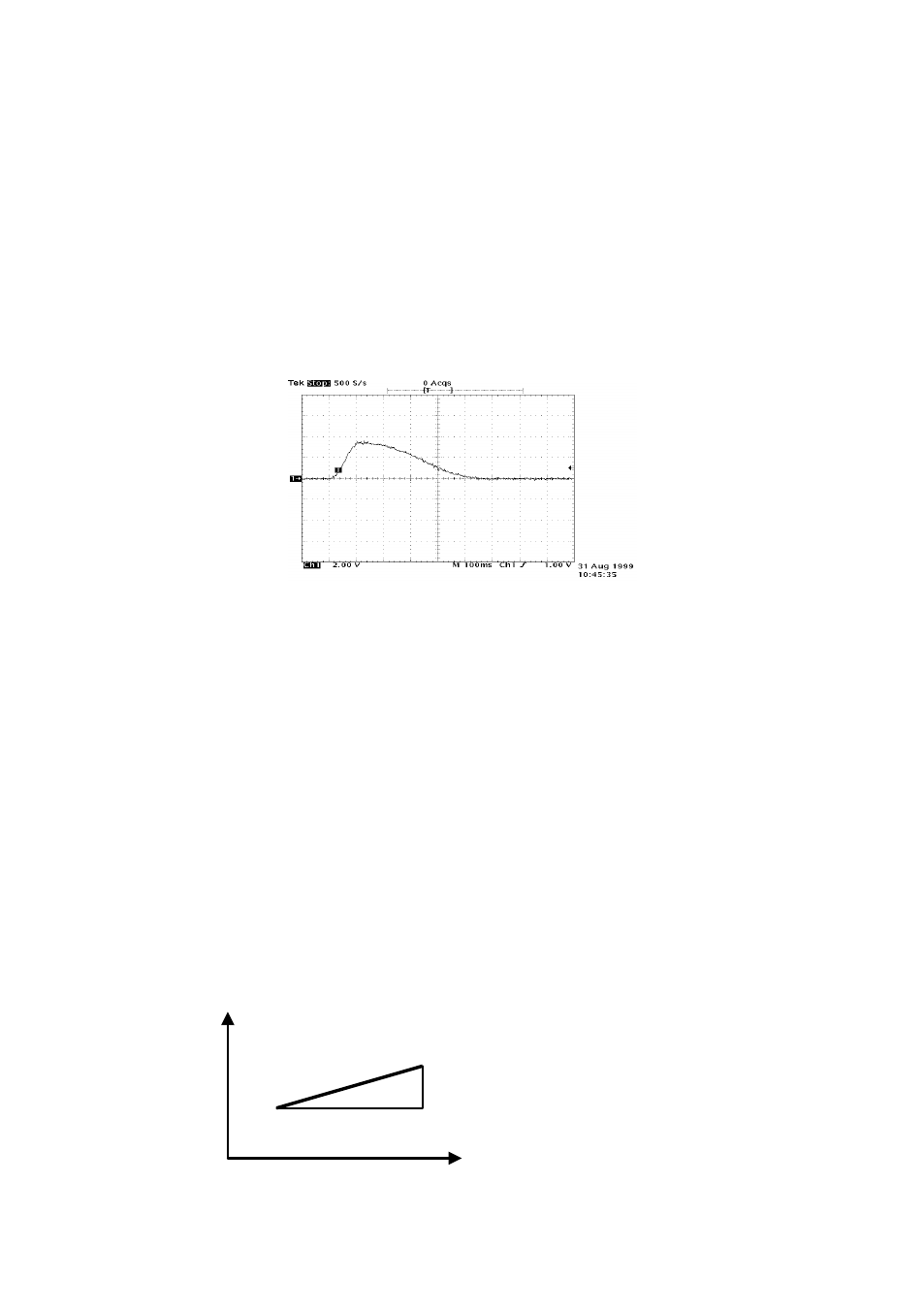
The total accelerating time = 0.05+2*0.05 = 0.15 (second).
Total decelerating time = 0.2+2*0.2 = 0.6 (second).
Command of Graph2:
start_tas_move(axis, 200000, 100, 1000000, 0.05, 0.05, 0.2, 0.2);
Relative Functions:
s_move(), rs_move(), tas_move(), start_s_move(), start_rs_move(),
start_tas_move() Refer to section 6.7
motion_done(): Refer to section 6.13
4.1.5
Linear Interpolated Motion
In this mode, two axes
( ″X and Y″ or ″Z and U″ axes) is controlled by linear
interpolation or circular interpolation by designating the number of pulses
respectively.
″Interpolation between two axes″ means the two axes start
simultaneously, and reach their ending points at the same time. For
example, in the Figure below, we want to move the axes from P0 to P1, and
hope the two axes start and stop simultaneously at a period of time
∆t. Then
the moving speed along X-axis and Y-axis will be
∆X/∆t., ∆Y/∆t. respectively.
P0
P1
X-Axis
Y
-Ax
is
∆X
∆Y