2 device maps, Comm u nic a ti ng w it h th e sk-1 000 se ri es, Remote register rwr (dl-cl1 -> master station) – KEYENCE DL-CL1 User Manual
Page 43
3-2 Device Maps
3-15
3
Comm
u
nic
a
ti
ng
w
it
h th
e
SK-1
000 Se
ri
es
- CC-Link Compatible Network Unit DL-CL1 User’s Manual (SK-1000) -
Number [n] denotes the first relay number assigned to the DL-CL1.
*1
Refer to
"Entering an External Input into a Sensor Amplifier" (page 3-18).
*2
Refer to
*3
Refer to
"Changing the BANK Number of Sensor Amplifiers" (page 3-21).
*4
Refer to
"Reading/Writing Settings or Status of a Sensor Amplifier" (page 3-23).
Refer to
"Issuing a Motion Command to a Sensor Amplifier" (page 3-22).
*5
Refer to
"Rewriting a Setting Value of a Sensor Amplifier" (page 3-23).
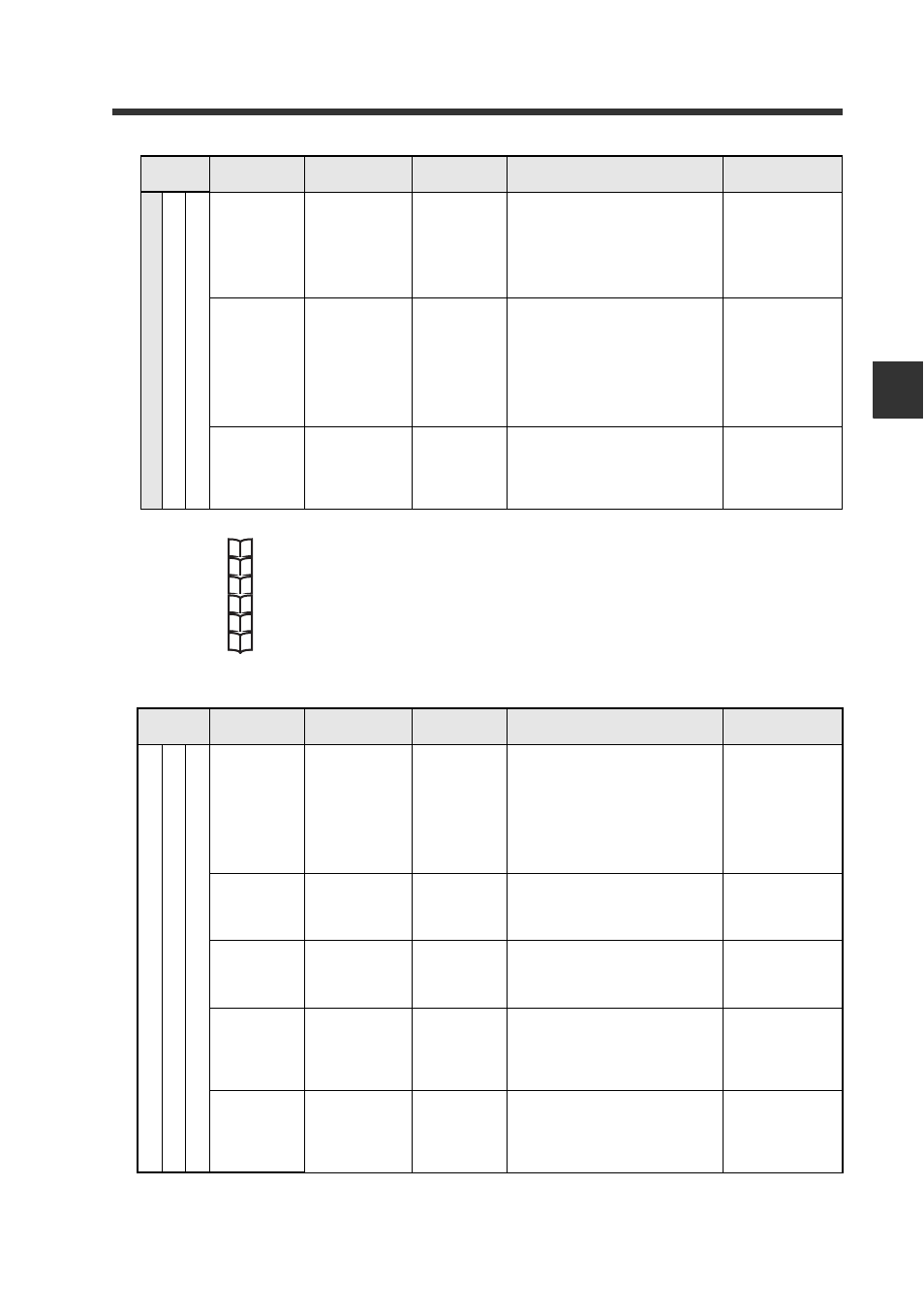
Remote register RWr (DL-CL1 -> master station)
Mo
ni
to
r mo
de
2
F
u
ll mo
d
e
1
F
u
ll mo
d
e
2
RY[n] + 7F
Clear HI setting
value (BANK 0)
rewrite error
*5
Used when rewriting a setting
value.
This is input when clearing a HI
setting-value (BANK 0) rewrite
error.
0->1: Clear error
RY[n] + 80
to 87
LO setting
value (BANK 0)
rewrite request
ID 01 to ID 08
*5
Used when rewriting a setting
value.
This is input when requesting to
rewrite the LO setting value (BANK
0) of each sensor amplifier.
The request input is received by
assigning each sensor amplifier
(ID 01 to ID 08) to each RY.
0->1: Request to
rewrite
RY[n] + 8F
Clear LO
setting value
(BANK 0)
rewrite error
*5
Used when rewriting a setting
value.
This is input when clearing a LO
setting-value (BANK 0) rewrite
error.
0->1: Clear error
Operating
mode
Device no.
(HEX)
Name
Communication
method
Description
Writing range
Operating
mode
Device no.
(HEX)
Name
Communication
method
Description
Reading range
Mo
nito
r mo
de
1
F
u
ll m
o
de
1
F
u
ll m
o
de
2
RWr[n] + 00
Error code
-
Stores an error code when error
status (RX[n] + 0F) turns ON.
If there are multiple errors, the
error having the smallest number
(two last digits in HEX) is stored. If
there are errors with multiple ID
numbers, the error information for
the smallest ID number is stored.
*5
RWr[n] + 01
Command
response
*3
Used when communicating under
handshake control program.
Stores details of command
execution result.
*6
RWr[n] + 02
to 03
(2 words)
Read data
*3
Used when communicating under
handshake control program.
Stores the parameter data read
from the sensor amplifier.
*7
RWr[n] + 04
External input-1
response
*1
Stores the external input-1
response of the sensor amplifier.
The response is output by
assigning sensor amplifiers (ID 01
to ID 08) to bits 0 - 07.
0: Input OFF
1: Input ON
RWr[n] + 05
External input-2
response
*1
Stores the external input-2
response of the sensor amplifier.
The response is output by
assigning sensor amplifiers (ID 01
to ID 08) to bits 0 - 07.
0: Input OFF
1: Input ON