2 device maps, Comm u nic a ti ng w it h th e sk-1 000 se ri es, Command response list – KEYENCE DL-CL1 User Manual
Page 38: Remote register rww (master station -> dl-cl1)
3-2 Device Maps
3-10
- CC-Link Compatible Network Unit DL-CL1 User’s Manual (SK-1000) -
Comm
u
nic
a
ti
ng
w
it
h th
e
SK-1
000 Se
ri
es
3
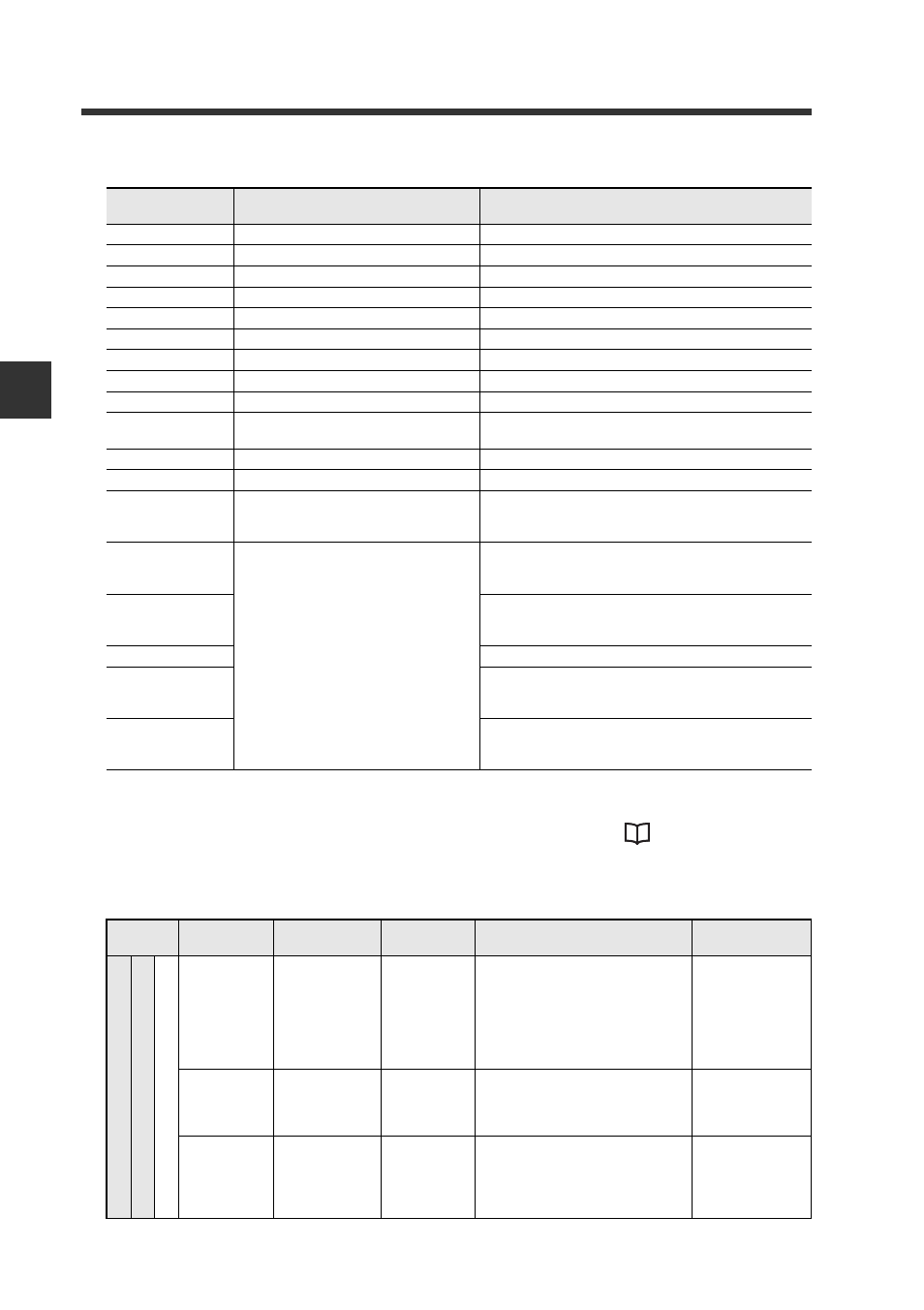
Command response list
* This response is provided specifically for data category 10. If the read data has decimal-point position
information and the command is successfully processed, the decimal-point position information is
added to the command response. For details of data category 10, refer to
Remote register RWw (master station -> DL-CL1)
Response
(HEX)
Name
Description
0000
Successfully completed
The command has been processed successfully.
0001
Command number error
The command number is out of range.
0002
Data category error
The data category value is out of range.
0003
ID number out of range
The ID number of sensor amplifier is out of range.
0004
Data number out of range
The data number is out of range.
0005
Write inhibit
Read-only data number. Cannot be written.
0006
Write data out of range
Data written is out of range.
0007
Sensor-to-sensor communication error
An error exists in the communication between sensors.
0008
Motion command access error
Cannot read/write to motion command data numbers.
0009
Motion command data number out of
range
The data number of motion command is out of range.
000A
Motion command execution error
Failed to execute the motion command.
000B
Read inhibit
Write-only data number. Cannot be read.
000C
Operating status error
Command communication (read or write) is
temporarily prohibited because of the operating status
of the sensor amplifier.
FFFF(-1)
Decimal point position of read data*
The command has been processed successfully.
The data being read has one decimal place.
********. *
FFFE(-2)
The command has been processed successfully.
The data being read has two decimal places.
********. **
…
…
FFF7(-9)
The command has been processed successfully.
The data being read has nine decimal places.
*. *********
FFF6(-10)
The command has been processed successfully.
The data being read has ten decimal places.
0. **********
Operating
mode
Device no.
(HEX)
Name
Communication
method
Description
Writing range
Sm
al
l-m
e
mo
ry
mo
de
1
Sm
al
l-m
e
mo
ry
mo
de
2
Mo
ni
to
r mo
de
1
RWw[n] + 00
Data category/
command
number
*3
Used when communicating under
handshake control program.
Specifies the data category and
command number of the
parameter to be communicated.
Upper byte:
00h - FFh
Lower byte:
00: Read
01: Write
02: Motion
command
RWw[n] + 01
Data number
*3
Used when communicating under
handshake control program.
Specifies the data number of the
parameter to be communicated.
0000h - FFFFh
RWw[n] + 02
to 03
Data to write
*3
Used when communicating under
handshake control program.
Specifies the data to be written in
the parameter to be
communicated.
*4