Rockwell Automation LDAT Integrated Linear Thrusters User Manual
Page 74
74 LDAT-Series Integrated Linear Thrusters
Rockwell Automation Publication LDAT-IN001A-EN-P - August 2012
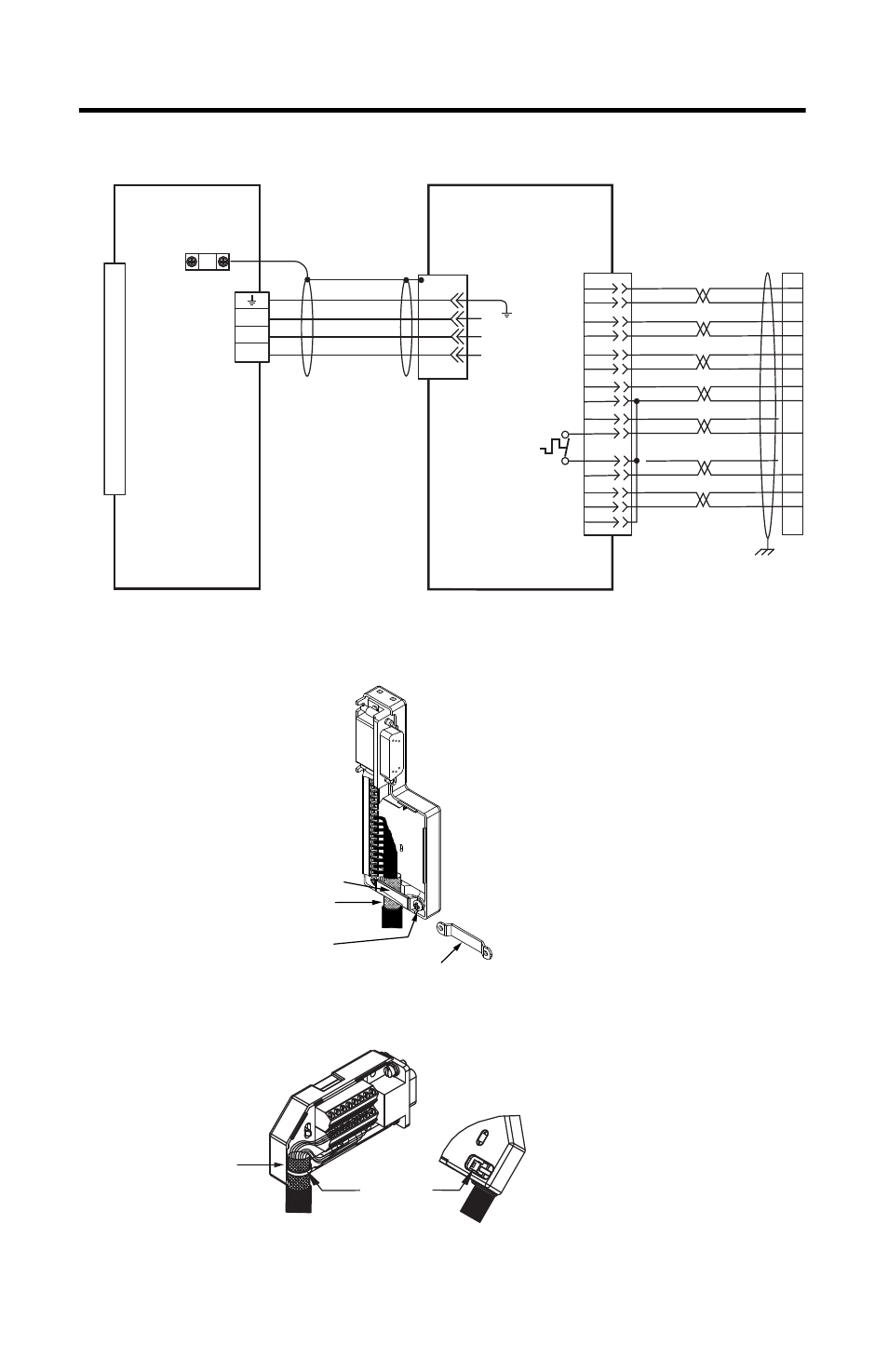
Wiring Examples for a Linear Thruster to an Ultra3000 Drive
Grounding Techniques for Feedback Cable Shield
W
V
U
GND
AM+
AM-
BM+
BM-
IM+
IM-
+5VDC
ECOM
BLUE
WHT/BLUE
GREEN
WHT/GREEN
GRAY
WHT/GRAY
BLACK
WHT/BLACK
RED
WHT/RED
1
2
3
4
5
10
14
6
12
TS-
S1
–
TS+
ORANGE
WHT/ORANGE
11
S2
S3
COM
YELLOW
WHT/YELLOW
13
8
3
4
5
6
1
2
14
15
16
17
12
11
13
9
10
D
C
B
A
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
4
3
2
1
Green/Yellow
Blue
Black
Brown
Shield
W
V
U
Motor Power
(TB1) Connector
LDAT-Series Integrated Linear
Thruster with Incremental Encoder
LDAT-Sxxxxxx-xB
Three-phase
Motor Power
Thermostat
2090-UXBB-DM15 Drive
Mounted
Connector
Ultra3000 Digital
Servo Drive
Cable Shield
Ground Clamp
Motor Feedback
(CN2) Connector
Motor
Feedback
2090-CPWM7DF-xxAAxx (standard)
or 2090-CPWM7DF-xxAFx
(continuous-flex)
Motor Power Cable
Note 1, 4
2090-XXNFMF-Sxx (standard) or
2090-CFBM7DAFxx (continuous-flex)
(flying-lead) Feedback Cable
Note 2
Clamp
Expose shield secured under clamp.
Clamp Screw (2)
Turn clamp over to hold small cable
secure.
Cable Tie
Exposed shield secured under
clamp.
Use 2090-K2CK-D15M connector
with these drives:
Kinetix 2000
Kinetix 300 and linear thruster with
incremental encoder
Use LDAT-CONNKIT-ABS connector with the
Kinetix 300 drive and a linear thruster with an
absolute encoder.
Use 2090-K6CK-D15M connector
with the
Kinetix 6000 drive.
Use 2090-UXBB-DM15 connector
with Ultra3000 drives.