Configure your linear thruster, Positive motion direction – Rockwell Automation LDAT Integrated Linear Thrusters User Manual
Page 34
34 LDAT-Series Integrated Linear Thrusters
Rockwell Automation Publication LDAT-IN001A-EN-P - August 2012
Configure Your Linear Thruster
Configure the linear thruster by using the basic parameter settings described in this section. Use
the procedure appropriate for your motion axis.
LDAT-S
xxxxxx-xB linear thrusters with incremental encoders, are compatible with all Kinetix
drives and have a default resolution of 5 μm. LDAT-S
xxxxxx-xD linear thrusters with absolute
encoders are only compatible with Kinetix 300 drives.
The type of Allen-Bradley drive connected to the linear thruster determines the configuration
procedure. The following table to shows you the configuration procedures to follow.
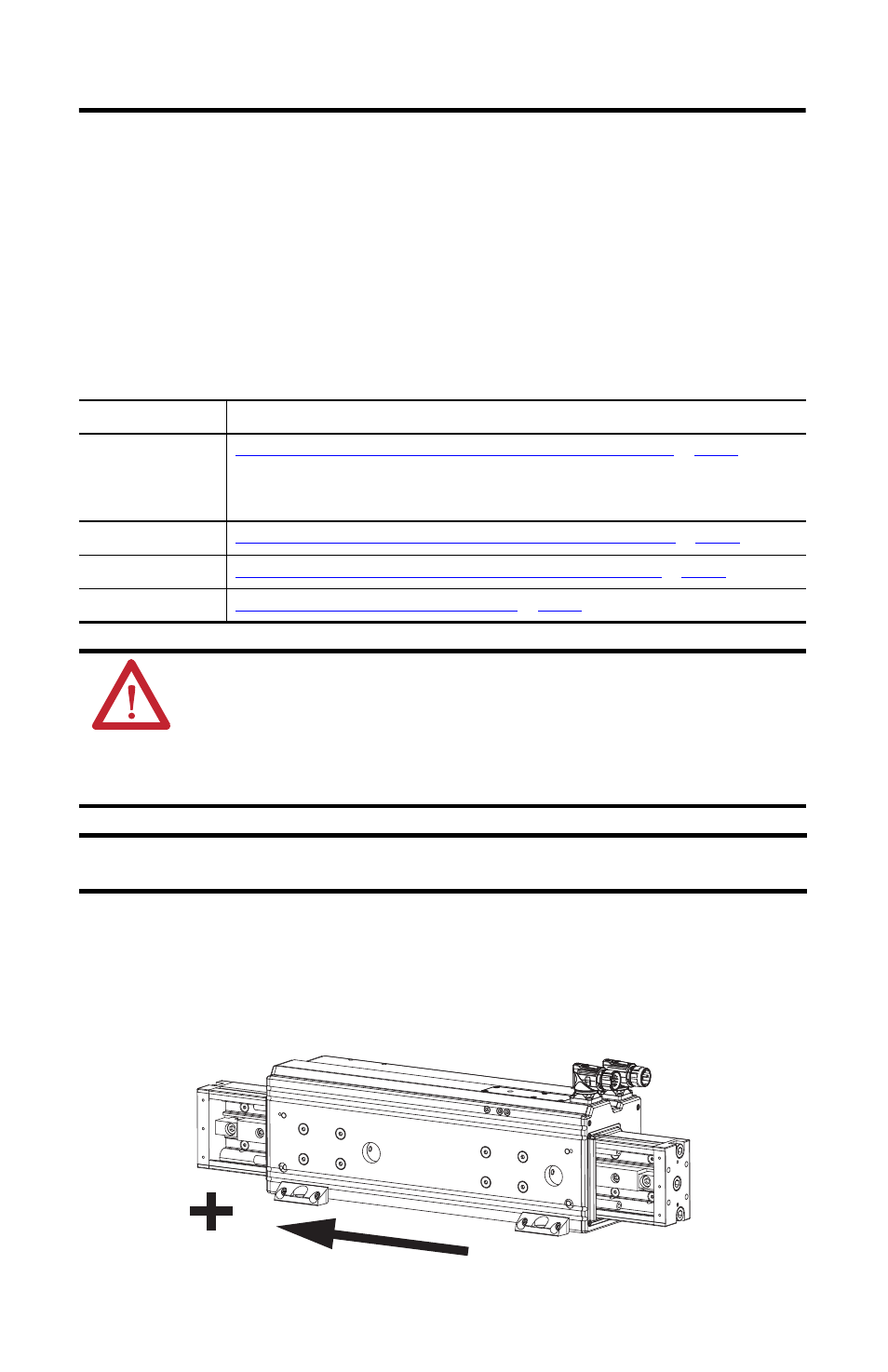
Positive Motion Direction
Positive motion is defined as the slider extending from the stator body opposite the power and
feedback connectors.
Drive
Refer to:
Kinetix 2000
Kinetix 6000
Kinetix 6200
Ultra3000 with SERCOS
Configure and Commission Your SERCOS Servo Drive with RSLogix 5000 Software
on
Kinetix 6500
Configure Your Kinetix 6500 EtherNet/IP Servo Drive with RSLogix 5000 Software
Kinetix 300
Configure Your Kinetix 300 EtherNet/IP Servo Drive with MotionView Software
Ultra3000 and Kinetix 3
Configure Your Servo Drive with Ultraware Software
on
ATTENTION: Moving parts can cause injuries. Before running the linear thruster, make sure all
components are secure and safe guards are in place to prevent access to the path of moving
machinery.
Safeguards should prevent access to the linear thruster until all motion has stopped.
Check that the linear thruster is clear of foreign matter and tools. Objects hit by the moving thrust
rod can become projectiles that can cause personal injury or damage to the equipment.
IMPORTANT
You must verify that the servo control system safely controls the linear thruster with regard to
maximum force, acceleration, and speed.