Autotune measure motor inertia – Rockwell Automation 1395 ControlNet Communication Board User Manual
Page 43
3–29
Configuration & PLC Interfacing
Publication 1395–5.37– March, 1999
Autotune Measure Motor Inertia
Puts the Drive in the Autotune Mode for measuring motor inertia.
When in this mode the Drive gathers information about motor inertia
by accelerating and decelerating the motor under conditions controlled
by the Autotune firmware.
ATTENTION: When in the Autotune Mode the Drive controls
motor operation using a speed profile determined internally.
Carefully read the section on auto tuning sequencing prior to using
this command. Failure to do so could result in equipment damage
and possible injury to personnel. If autotuning is performed under
PLC control, a hardwired stop circuit or manual disconnect circuit
must be provided to disconnect power to the motor.
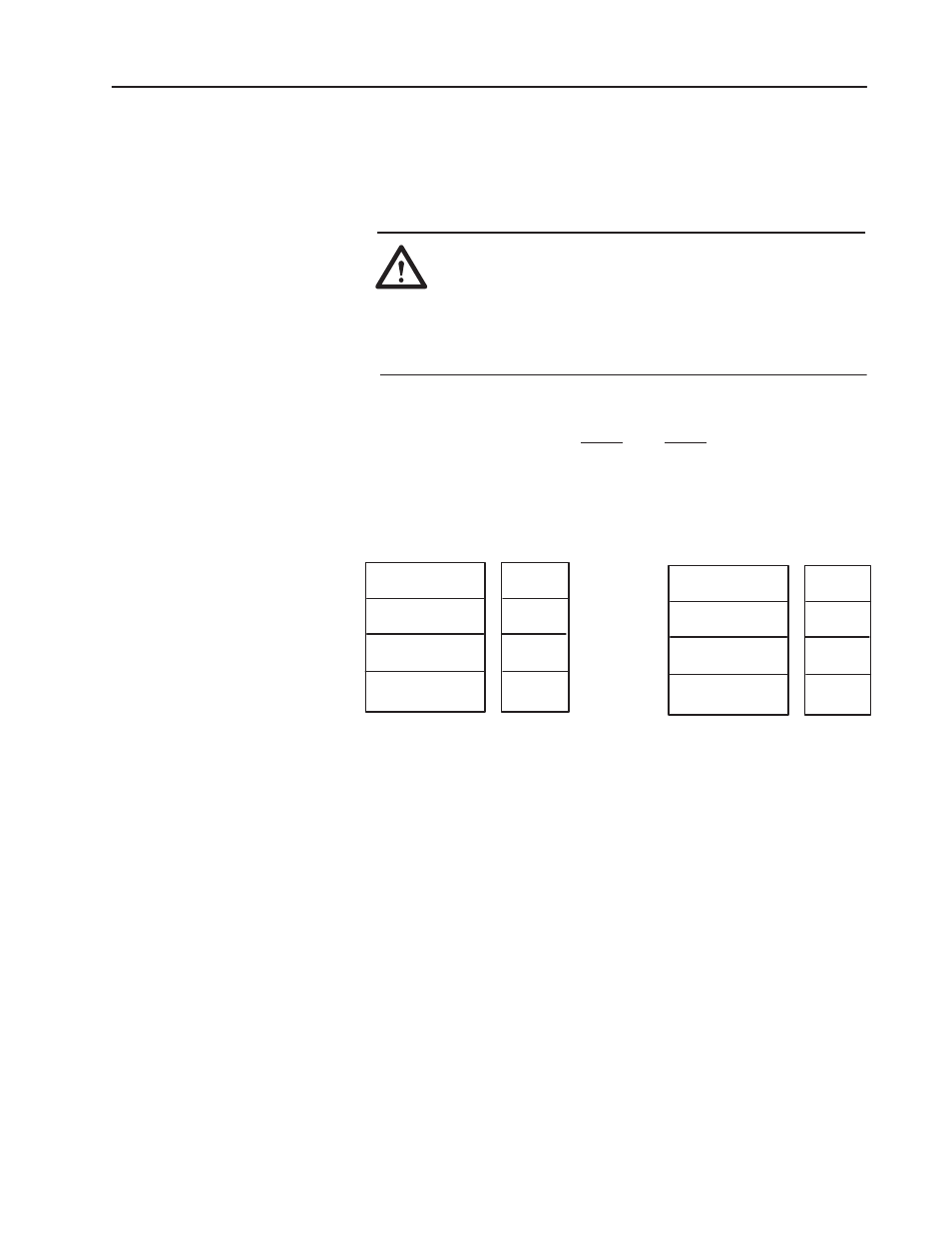
PLC Block Transfer Instruction Data –
Write
Read
Size In Elements:
4
4
Processor Type:
PLC-5
PLC-5
Destination Address:
N40:0-3
N40:0-3
Message Structure –
0
PLC Message Write
PLC Message Read
NOTE:
Word 4 of the PLC Message Read instruction is broken down
into two bytes. The High byte contains the status bits
The Low byte contains the Drive message length in bytes.
Header
Word 1
0
Function Code
269
Message Length
8 bytes
Header
Word 2
Header
Word 3
Header
Word 4
0
Header
Word 1
0
Function Code
269
See Note
Header
Word 2
Header
Word 3
Header
Word 4
Message Operation – This function puts the Drive in the Autotune
Mode for measuring motor inertia. Once in this mode, the Drive waits
for a “START” input to the Drive before beginning the measure
procedure. The procedure gathers information about motor inertia by
accelerating and decelerating the motor under conditions controlled by
the Autotune firmware.
This function requires the message header only. The status byte will
indicate the success or ineffectiveness of this request.