S-shaped ramps (s profile), Function library, Positioning control – Lenze EVS9332xP User Manual
Page 88
Function library
Positioning control
3.4.9
Travel profile generator and setpoints
3−60
l
EDSVS9332P−EXT DE 2.0
3.4.9.2
S−shaped ramps (S profile)
Purpose
Protection from damage of the drive components by reducing the jerk during acceleration and
deceleration.
V
t
t
a
t
Ruck
1
2
3
4
5
6
7
8
9
VTVEL
VTACC
VTACC
C1256
C1256
C1256
C1256
a
max
a
max
tr
tr
tr
tr
9300pos002
VTVEL =
+ VTACC =
− VTACC =
Traversing speed
Acceleration
Deceleration
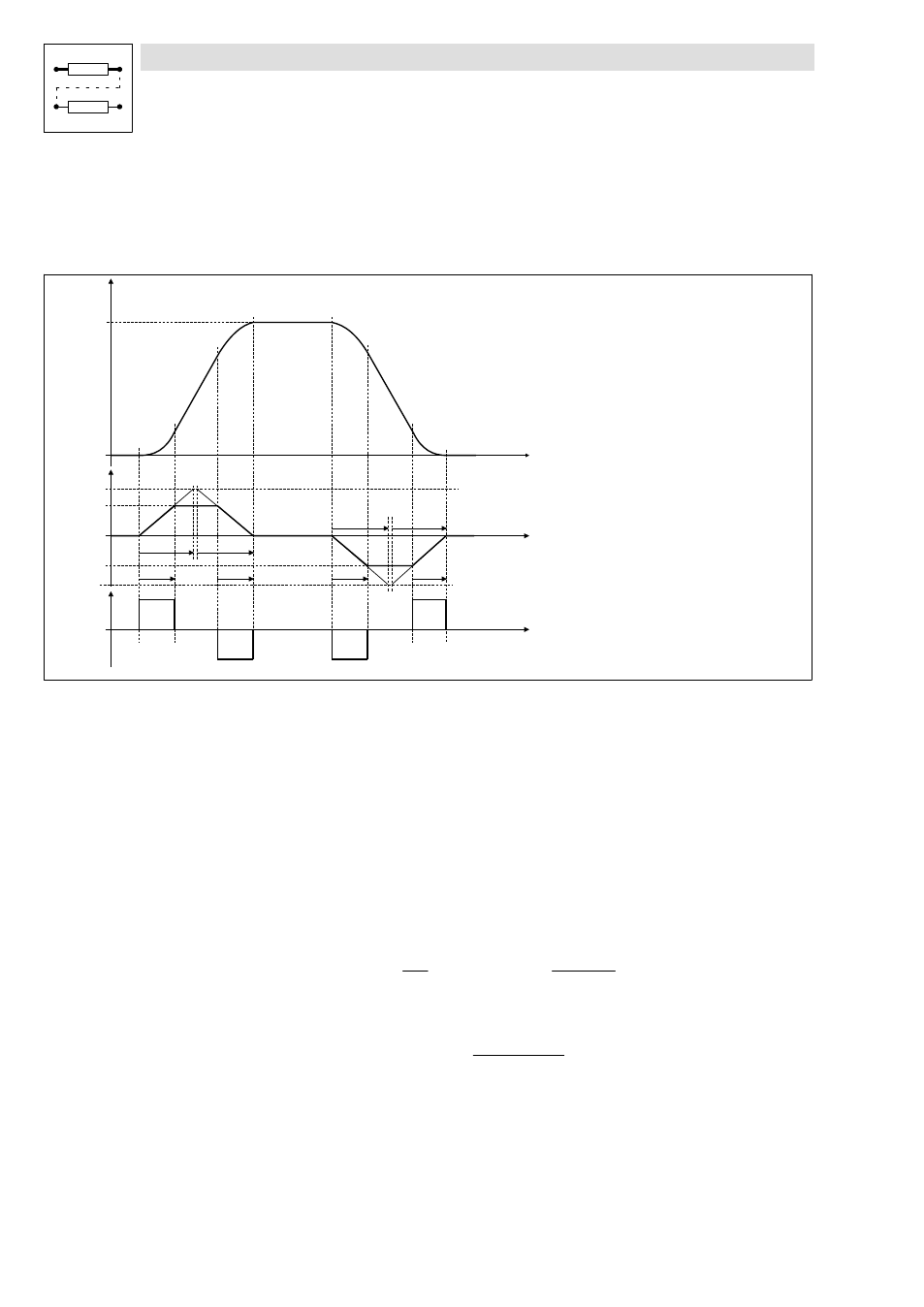
Fig. 3−23
S−shaped ramps (S profile)
1.
Standstill
6.
Deceleration with set jerk
2.
Deceleration with set jerk
7.
Deceleration with VTACC
3.
Acceleration with VTACC
8.
Reduce deceleration with set jerk
4.
Reduce acceleration with set jerk
9.
Drive in targetposition
5.
Traversing with VTVEL
l
With the S profile acceleration and deceleration processes are started smoothly. The defined
acceleration is only reached at the end of the jerk time.
– A slower acceleration always leads to a longer positioning time − compared to the
time−optimised L profile.
– Set jerk time (T
r
) via C1256.
T
r
corresponds to the time when the max. acceleration a−max (C1250) is reached. The actual
jerk time tr decreases according to the actual acceleration a:
t
r
+ T
r
a
a
max
³ t
r
+ C1256
VTACC [%]
100 %
– Reducing the jerk or increasing the jerk time (t
r(RED)
) can be set via the input
POS−JERK−RED" (default setting 100%).
t
r(RED)
+ t
r
100%
POS−JERK−RED