9 travel profile generator and setpoints, Travel profile generator and setpoints, Function library – Lenze EVS9332xP User Manual
Page 86: Positioning control, Purpose
Function library
Positioning control
3.4.9
Travel profile generator and setpoints
3−58
l
EDSVS9332P−EXT DE 2.0
3.4.9
Travel profile generator and setpoints
9300POS024
P O S - A B S - I N
C 1 3 6 4 / 2
C 1 3 6 5 / 2
P O S - N O U T
P O S - L I M - P O S
C 1 3 6 1 / 5
C 1 3 6 0 / 5
P O S - L I M - N E G
C 1 3 6 1 / 4
C 1 3 6 0 / 4
P O S - P S E T - E X T
C 1 3 6 4 / 1
C 1 3 6 5 / 1
P O S - N - I N
C 1 3 6 2 / 4
C 1 3 6 3 / 4
P O S - P - I N
C 1 3 6 4 / 3
C 1 3 6 5 / 3
P O S - A - O V E R R I D
C 1 3 6 2 / 3
C 1 3 6 3 / 3
P O S - V - O V E R R I D
C 1 3 6 2 / 2
C 1 3 6 3 / 2
P O S - S - R A M P S
C 1 3 6 1 / 1 7
C 1 3 6 0 / 1 7
P O S - P A R A M - R D
C 1 3 6 1 / 1 8
C 1 3 6 0 / 1 8
P O S - L O O P - I N H
C 1 3 6 1 / 1 9
C 1 3 6 0 / 1 9
P O S - P S E T - S W T
C 1 3 6 1 / 2 0
C 1 3 6 0 / 2 0
P O S - A B S - S E T
C 1 3 6 1 / 2 1
C 1 3 6 0 / 2 1
M C T R L - P H I - A C T
0
1
0
1
+
P O S - S E T P O S
C 1 2 2 1 / 2
L I M - C T R L
P O S - I N - T A R G E T
P O S - P O U T
P O S - V T R A V - R E A
P O S - V F I N - R E A C
P O S - A C C - R A M P
P O S - V S E T
C 1 2 4 5 / 1
P O S - A S E T
C 1 2 5 5 / 1
P O S - D C C
C 1 2 5 5 / 3
P O S - A C C
C 1 2 5 5 / 2
P O S - V F I N A L
C 1 2 4 5 / 3
P O S - V T R A V
C 1 2 4 5 / 2
P O S - T A R G E T
C 1 2 2 1 / 1
P O S - D C C - R A M P
P O S - R E F - O K
P O S - M A N U - A C T
P O S - S T D B Y - A C T
P O S - A C T P O S
P O S - T P
P O S - M O U T
0
1
P O S - M - I N
C 1 3 6 2 / 6
C 1 3 6 3 / 6
P O S - M O U T - G A I N
C 1 3 6 2 / 7
C 1 3 6 3 / 7
V S E T - E X T
S E T P O S - E X T
A S E T - E X T
1
0
1
0
V S E T = 0
S E T P O S = A C T P O S
A S E T = 0
M C T R L - Q S P - O U T
D C T R L - C I N H
P O S - N O U T - G A I N
C 1 3 6 2 / 5
C 1 3 6 3 / 5
P O S - N S E T
-
C 1 2 2 1 / 3
C 1 2 2 0 / 1
C 1 2 2 0 / 2
C 1 2 2 0 / 3
P O S - W A I T S T A T E
C 1 3 6 1 / 2 2
C 1 3 6 0 / 2 2
C 1 2 2 1 / 4
C 1 2 2 0 / 4
P O S - J E R K - R E D
C 1 3 6 2 / 8
C 1 3 6 3 / 8
P O S - P O U T - N O R M
C 1 2 1 8 / 1
P O S - P H I - S E T
P O S - P H I - A D D
C 1 3 6 6 / 1
C 1 3 6 7 / 1
P O S - A B S - V A L
S p e e d p r o f i l e r
( f r o m p a t h c o n t r o l u n i t )
+
+
+
+
+
-
( T o u c h P r o b e )
( S p e e d )
( F o l l o w i n g e r r o r )
( T o r q u e )
0
1
C 1 2 2 1 / 7
h o m e p o s i t i o n
h o m e o f f s e t
C 1 2 2 1 / 1 6
C 1 2 2 0 / 1 6
C 1 2 2 5
( V i r t u a l m a s t e r f u n c t i o n )
S E T P O S
T A R G E T
=
&
S e t
( f e e d b a c k s e l e c t e d u n d e r C 4 9 0 )
C 1 2 2 1 / 8
C 1 2 2 7
( G e n e r a t i o n o f a c t u a l p o s i t i o n )
( I n f l u e n c e o f f e e d f o r w a r d v a l u e s )
( E x t e r n a l s e t v a l u e s f o r s t a n d - b y o p e r a t i o n )
( V a l u e s f o l l o w i n g t h e p r o f i l e )
( L a t c h e d p r o f i l e v a l u e s )
( P 1 4 t o l e r a n c e )
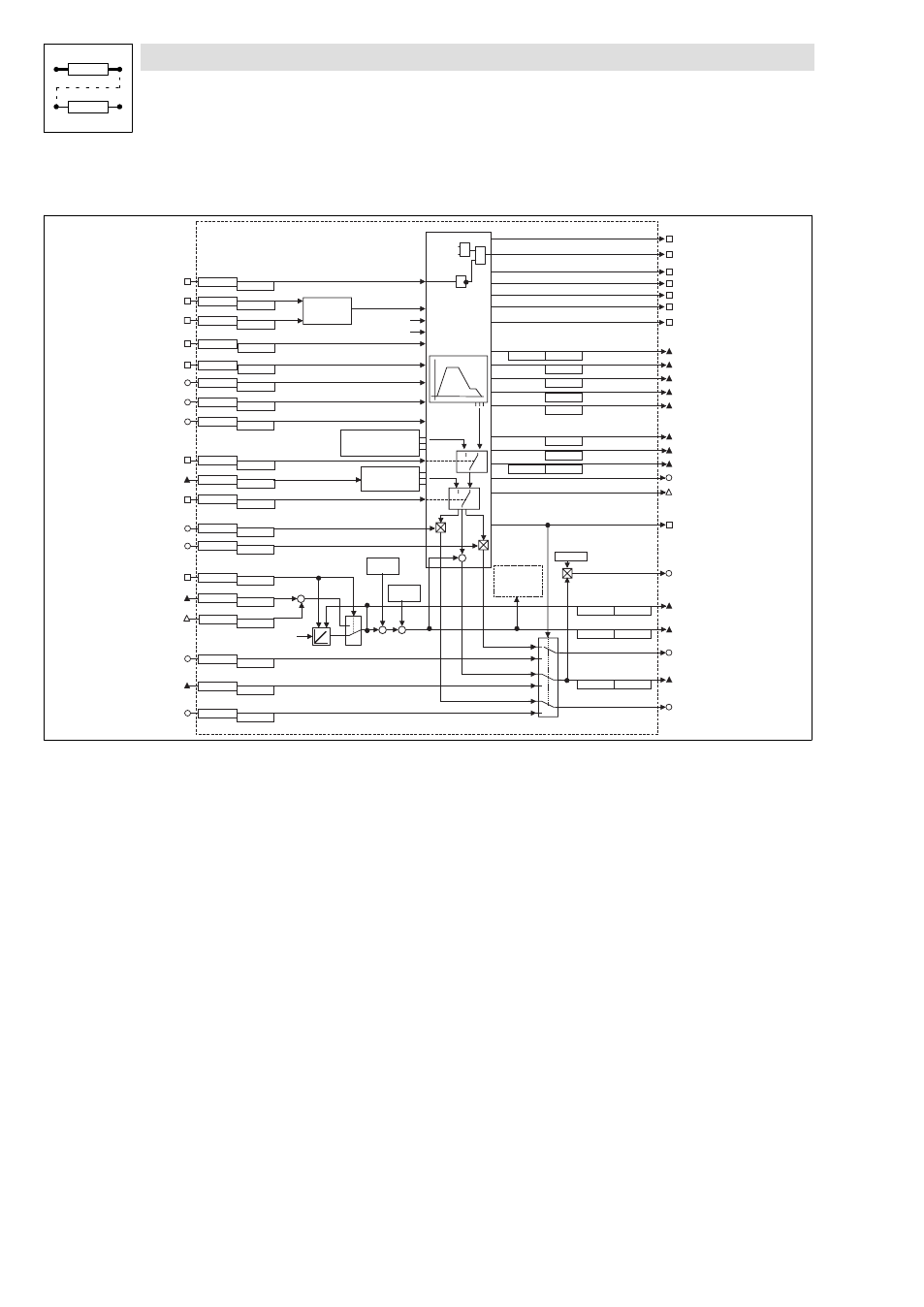
Fig. 3−21
Part of the POS function block
Purpose
l
The travel profile generator of the POS function block generates a speed travel profile with the
corresponding setpoints for:
− position setpoint (POS−SETPOS),
− speed feedforward control value and (POS−NOUT) and
− torque precontrol value (POS−MOUT).
l
The travel profile is generated with regard to the defined travel profile parameters:
− target position (VTPOS),
− traversing speed (VTVEL)
− acceleration (VTACC)
− deceleration (VTACC)
− final speed (VTVEL).
l
The travel profile parameters are always read by the profile generator at the beginning of a
positioning process and remain unchanged for the entire positioning time. The override inputs
(POS−V−OVERRID, POS−A−OVERRID) are taken into consideration during this process.
The values given in the variable tables VTxxx can already be changed for the next positioning
while the current positioning is still running.