6 control structure, Control structure, Function library – Lenze EVS9332xP User Manual
Page 70: Positioning control
Function library
Positioning control
3.4.6
Control structure
3−42
l
EDSVS9332P−EXT DE 2.0
3.4.6
Control structure
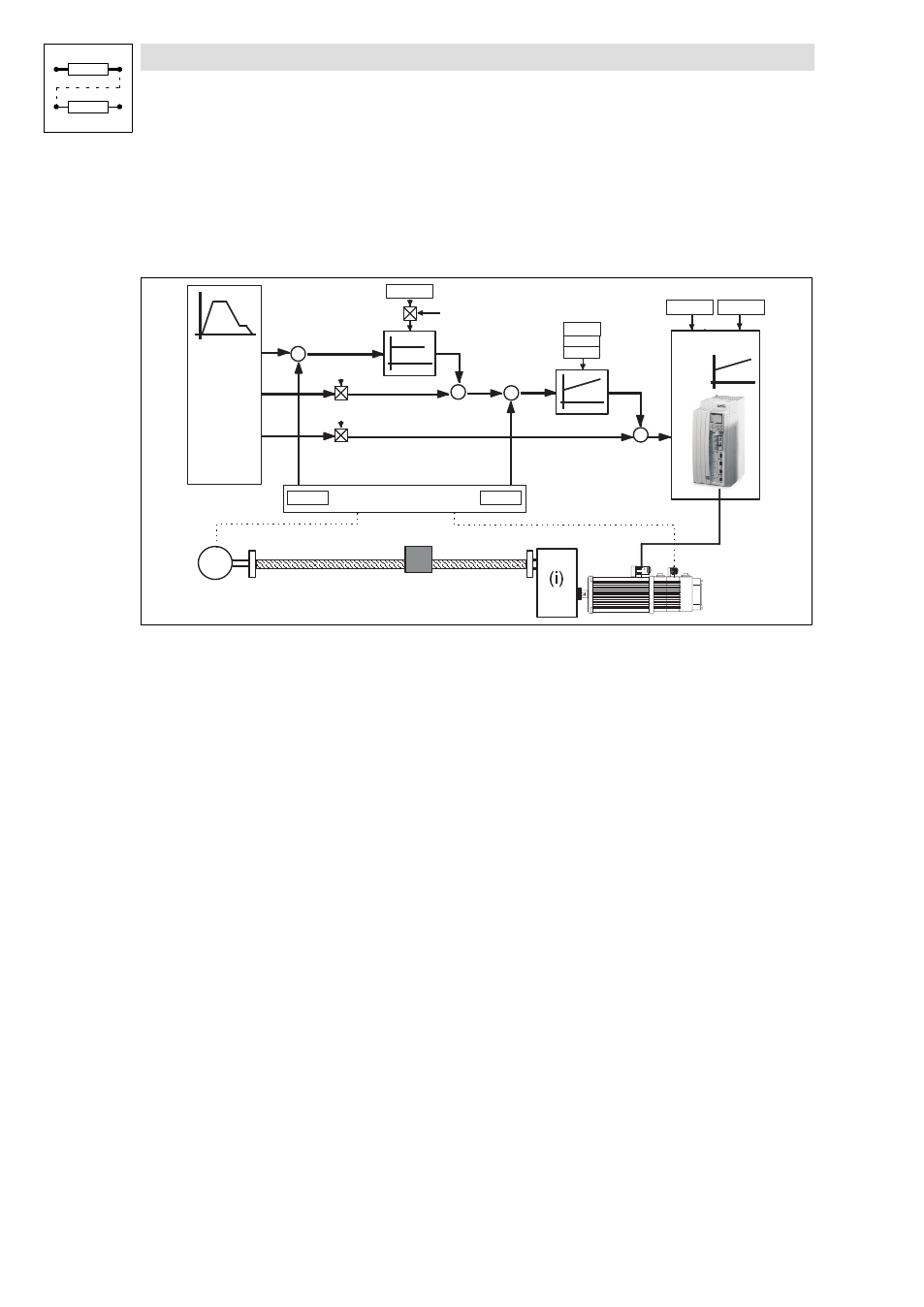
The following graphic representation provides an overview of the control structure realised in the
9300 servo position controller. It shows the parameters and codes that are decisive for the
adjustment of the control loops.
optional
Enc
Feedback systems
NOUT
POS
(MOUT)
C0254
C0075
C0076
MCTRL-P-ADAPT
NOUT-GAIN
MOUT-GAIN
Curent control
PWM
C0070
C0071
C0072
Vp
Tn
Td
Vp
+
+
+
+
Vp
Tn
+
(-)
+
(-)
actual
position
actual
speed
C0490
C0495
SETPOS
9300POS039
Adjustment points of the control loops
l
Speed controller (PID controller)
– C0070: Gain Vp
n
– C0071: Integral−action time Tn
n
– C0072: Rate time Td
n
(default setting Td
n
= 0 is usually not changed)
– POS−NOUT−GAIN: Speed feedforward control (default setting: 100%)
l
Position controller (P controller)
– C0254: Gain Vp position controller
– MCTRL−P−ADAPT for adapting the gain depending on e.g. the speed
l
Current controller (PI controller)
– C0075: Vp (default setting is usually not changed)
– C0076: Tn (default setting is usually not changed)