Point-to-point positioning, Function library, Positioning control – Lenze EVS9332xP User Manual
Page 106
Function library
Positioning control
3.4.13
Program sets (PS)
3−78
l
EDSVS9332P−EXT DE 2.0
3.4.13.2
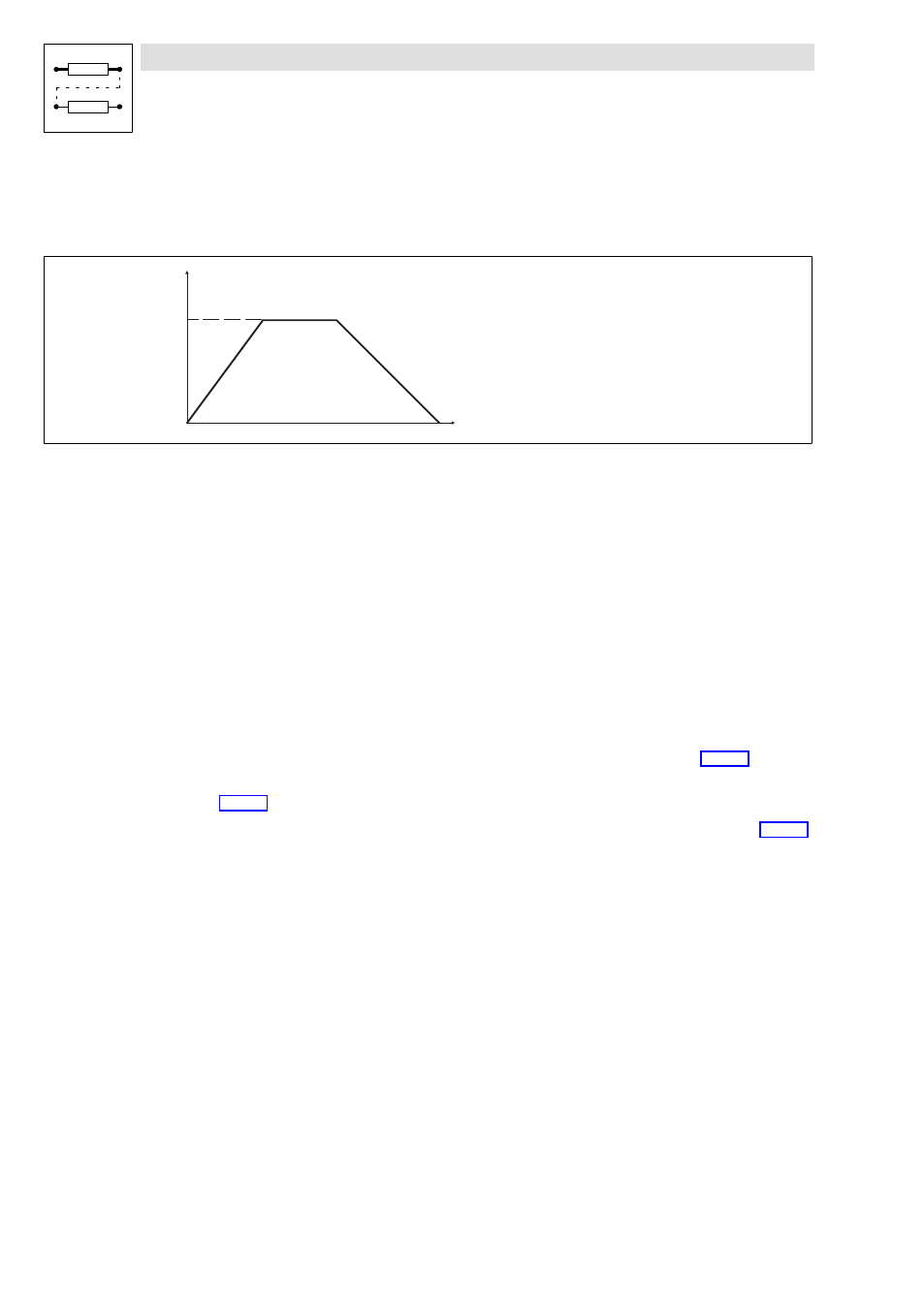
Point−to−point positioning
Purpose
Point−to−point positioning of a defined target position
0.
9300POS026
VTVEL =
+ VTACC =
− VTACC =
Traversing speed
Acceleration
Deceleration
t
v
-a
a
v
const.
0
Fig. 3−29
Point−to−point positioning
Function
l
PS mode (C1311): Select Absolute PS" or Relative PS".
l
The travel profile is generated according to the parameters selected (see also travel profile
generator).
l
The travel profile parameters can be adjusted individually for any PS. They are selected from
the variable tables VTxxx:
Select target position from VTPOS" (selection under C1312/x)
Select traversing speed from VTVEL" (selection under C1313/x)
Select acceleration from VTACC" (selection under C1314/x)
Select deceleration from VTACC" (selection under C1315/x)
Final speed = 0 (standstill) (selection under C1316/x)
l
Point−to−point positioning is possible with the positioning modes (C1210) absolute" and
relative positioning".
l
The travel profile parameters can be changed during positioning (see chapter 3.4.9.4)
l
The travel profile parameters can be adjusted during operation with the override inputs (see
chapter 3.4.9.3).
l
The status output POS−IN−TARGET displays the end of a positioning process (see also 3.4.9.7)