Function library, Positioning control – Lenze EVS9332xP User Manual
Page 55
Function library
Positioning control
3.4.2
Machine parameters
3−27
l
EDSVS9332P−EXT DE 2.0
Application example
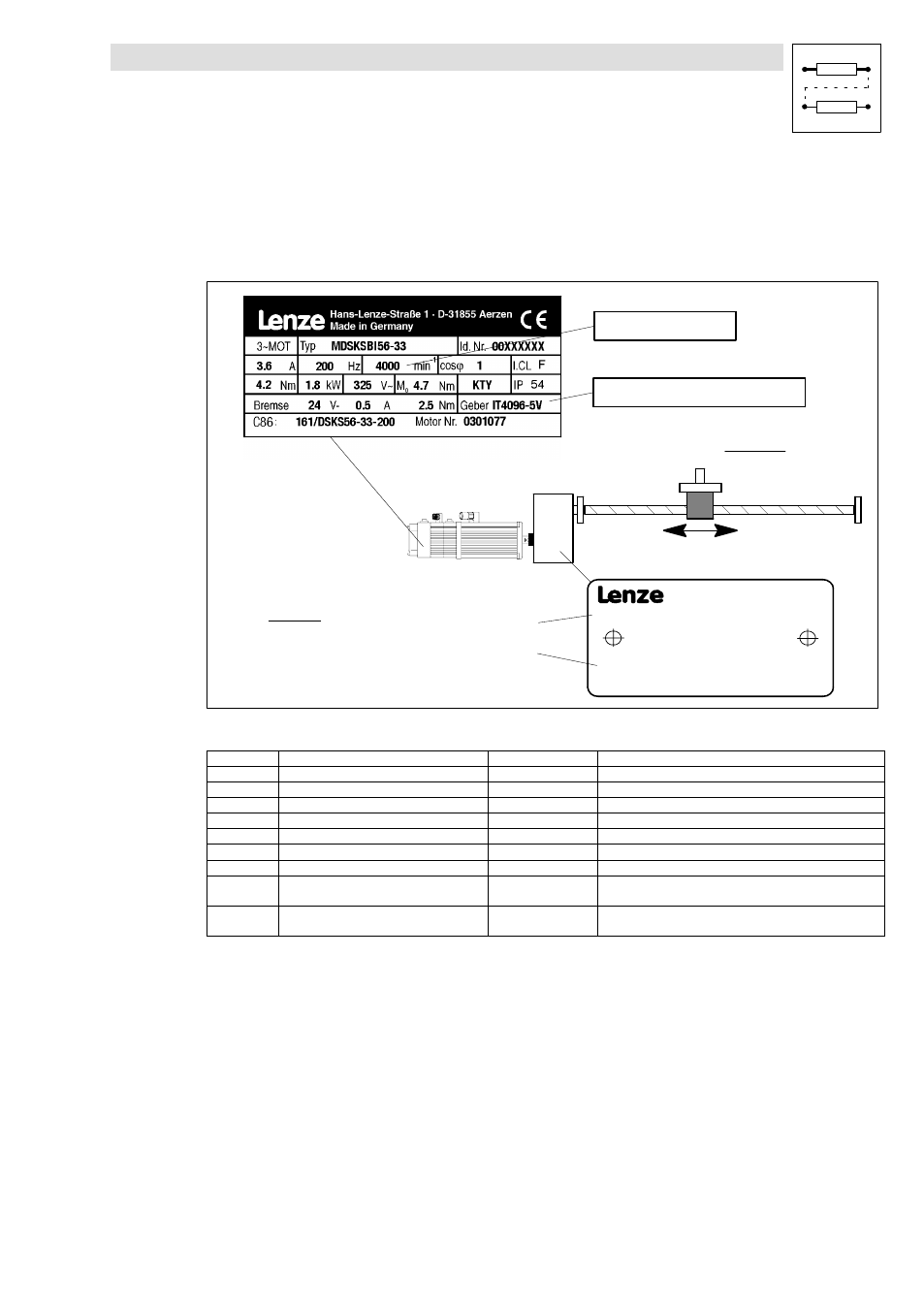
For positioning a spindle feeding unit is driven via a gearbox. Instead of the standard resolver an
incremental encoder is used as feedback system. The incremental encoder is mounted to the motor
and has a number of increments of 4096 pulses / rev.. The gearbox has a ratio of i = 32 (n
motor
/n
spindle
).
The spindle has a lead of h = 10 mm. The entries are to be made in mm (1 mm = 1 unit).
EXTERTAL/Germany
GFL05−2 M HCR 080−32
295 Nm
24 /min (50 Hz)
i=58.667
CLP460
1196
GT/40000027
004 B
00500038
i
+
( z2
@ z4 )
( z1
@ z3 ) +
58, 667
z1 = 12
z2 = 88
z3 = 9
z4 = 72
C1202
+ z2 @ z4 + 6336
C1203
+ z1 @ z3 + 108
C1204
+ 5.023
mm
Umdrehung
C0011
+ 4000 min
*1
C0025
ń113 + Enc TTL, 4096 inc, 5V
Settings:
Code
Designation
Entry
Notes
C0025
Encoder system selection
−113−
Incremental encoder, IT−4096−5V
C0420
Encoder constant X8
4096 incr
(automatically through C0025)
C0490
Position feedback system
−1−
(TTL encoder) (automatically through C0025)
C0495
Speed feedback system
−1−
(TTL encoder) (automatically through C0025)
C1202
Gearbox numerator
6336
Numerator corresponds to motor speed
C1203
Gearbox denominator
108
Denominator corresponds to gearbox output speed
C1204
Feed constant
5.023 units/rev
mm per rev. at gearbox output
C1207/1
Position encoder gearbox factor, numerator 1
(1/1 = no gearbox between encoder and motor)
Numerator corresponds to motor speed
C1207/2
Position encoder gearbox factor,
denominator
1
(1/1 = no gearbox between encoder and motor)
Denominator corresponds to encoder speed