Application examples, 3 example 3: path control – Lenze EVS9332xP User Manual
Page 321
Application examples
4.3
Example 3: Path control
4−11
l
EDSVS9332P−EXT DE 2.0
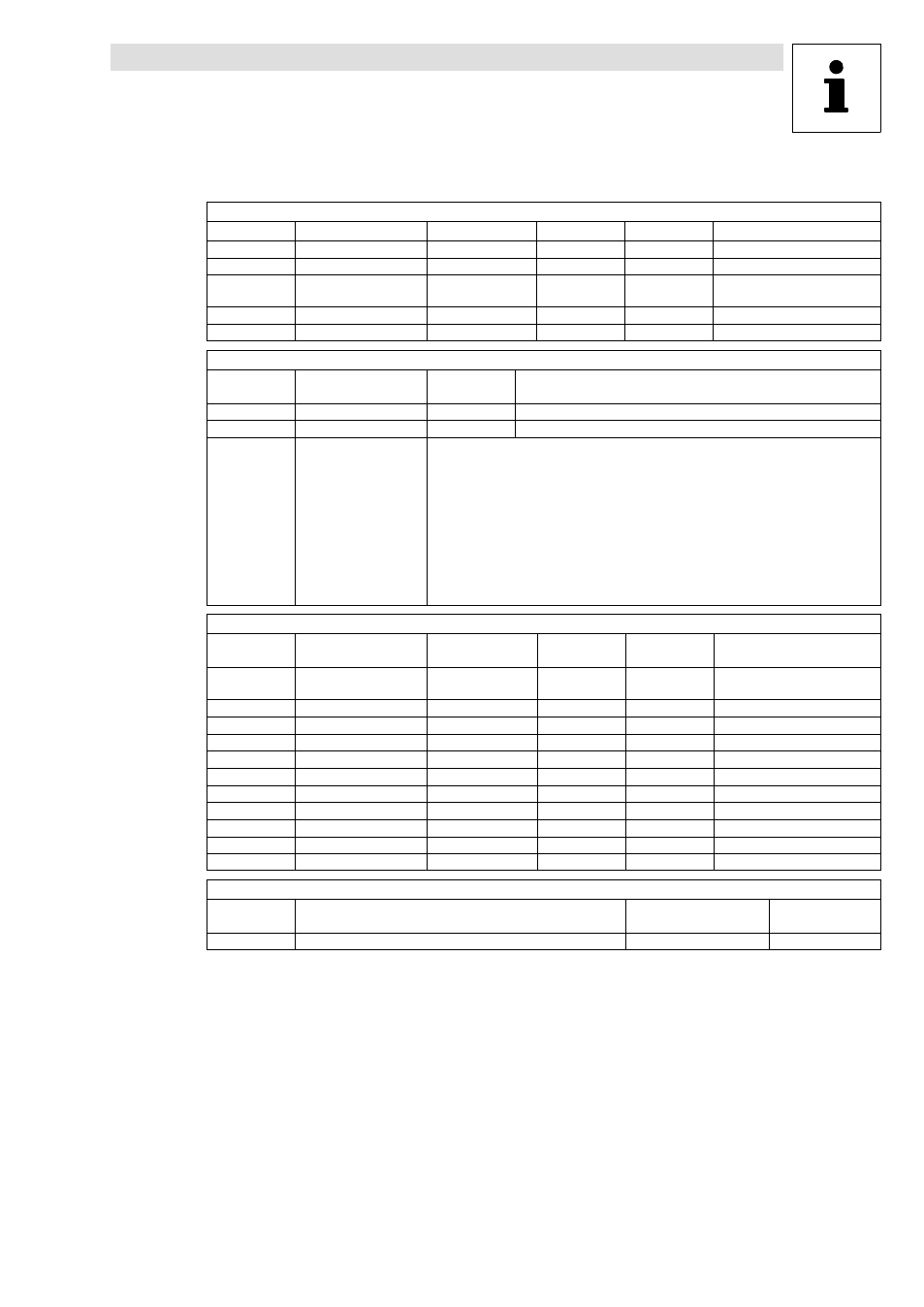
Basis: Basic configuration 26000
Terminal assignment
Inputs
Function 1
Function 2
Function 3
Outputs
Function
X5/E1
Negative manual jog
External setpoint off
X5/A1
Synchronisation status
X5/E2
Positive manual jog
External setpoint off
X5/A2
Following error 1
X5/E3
Program start
Actual position =
external setpoint
PS function
X5/A3
Ready for operation
X5/E4
Homing switch
PS function
X5/A4
Reference known
X5/E5
Trip reset
Assignment of CAN1
Inputs
Function
Outputs
CAN−OUT1.
Function
W1
Actual speed value
D1
Actual position
CAN status word (bit 0.... bit15)
1: Pulse inhibit
2: Reference known
4: M
max
(Iow active)
5: Target position reached
6: n_act = 0
7: Controller inhibit CINH
12: Fault warning
13: Fault message
14: Fault quick stop
15: Ready for operation
Assignment of CAN2
Inputs
CAN−IN2.
Function 1
Function 2
Function 3
Outputs
CAN−OUT2.
Function
B0
PS function
(POS−PFI1)
Program stop
B0
Trip
B1
PS function
Program reset
B1
Program completed
B2
PS function
Program start
Manual jog off
B2
Traversing speed reached
B3
PS function
B3
PS function (POS−PFO4)
B4
PS function
B4
PS function
B5
PS function
B5
PS function
B6
PS function
B6
PS function
B7
PS function
Cancel PS
B7
PS function
B8 − B29
PS function
B8 − B29
PS function
B30
B30
PS function
B31
B31
PS function (POS−PFO32)
Assignment of CAN3
Input
CAN−IN2.
Function
Outputs
Function
D1