Absolute value encoder via system bus (can), Function library, Positioning control – Lenze EVS9332xP User Manual
Page 68: 5 absolute value encoder, Function, P o s 2 0
Function library
Positioning control
3.4.5
Absolute value encoder
3−40
l
EDSVS9332P−EXT DE 2.0
3.4.5.2
Absolute value encoder via system bus (CAN)
Purpose
l
Using absolute value encoders with CAN interface (e. g. laser measuring system).
⋅
9300POS009
x x
A b a r b e i t u n g s t a b e l l e
p r o c e s s i n g l i s t
P O S
2 0
C A N - I N 3
C A N - I N 3 . D 1
* *
t r a n s m i t t e d a b s o l u t e
e n c o d e r v a l u e
F I X E D - 1
F I X E D - 1
C O N V P H P H 2
x
y
1
C O N V P H P H 2
- O U T
C O N V P H P H 2 - N U M
C O N V P H P H 2 - I N
C O N V P H P H 2 - A C T
C O N V P H P H 2 - D E N
F C O D E - C 4 7 3 / 4
1 8
F C O D E - C 4 7 3 / 5
( a d j u s t e d v a l u e )
( a d j u s t e d v a l u e )
P O S - A B S - I N
C 1 3 6 4 / 2
C 1 3 6 5 / 2
P O S - A B S - S E T
C 1 3 6 1 / 2 1
C 1 3 6 0 / 2 1
M C T R L - P H I - A C T
+
P O S - A C T P O S
P O S - T P
C 1 3 6 2 / 7
C 1 3 6 3 / 7
P O S - N O U T - G A I N
C 1 3 6 2 / 5
C 1 3 6 3 / 5
-
C 1 2 2 1 / 3
C 1 2 2 0 / 3
P O S - P H I - A D D
C 1 3 6 6 / 1
C 1 3 6 7 / 1
P O S - A B S - V A L
+
+
+
+
+
-
( T o u c h P r o b e )
0
1
C 1 2 2 1 / 7
h o m e p o s i t i o n
h o m e o f f s e t
C 1 2 2 1 / 1 6
C 1 2 2 0 / 1 6
C 1 2 2 5
S e t
( f e e d b a c k s e l e c t e d u n d e r C 4 9 0 )
C 1 2 2 1 / 8
C 1 2 2 7
( G e n e r a t i o n o f a c t u a l p o s i t i o n )
( I n f l u e n c e o f f e e d f o r w a r d v a l u e s )
F I X E D 0 %
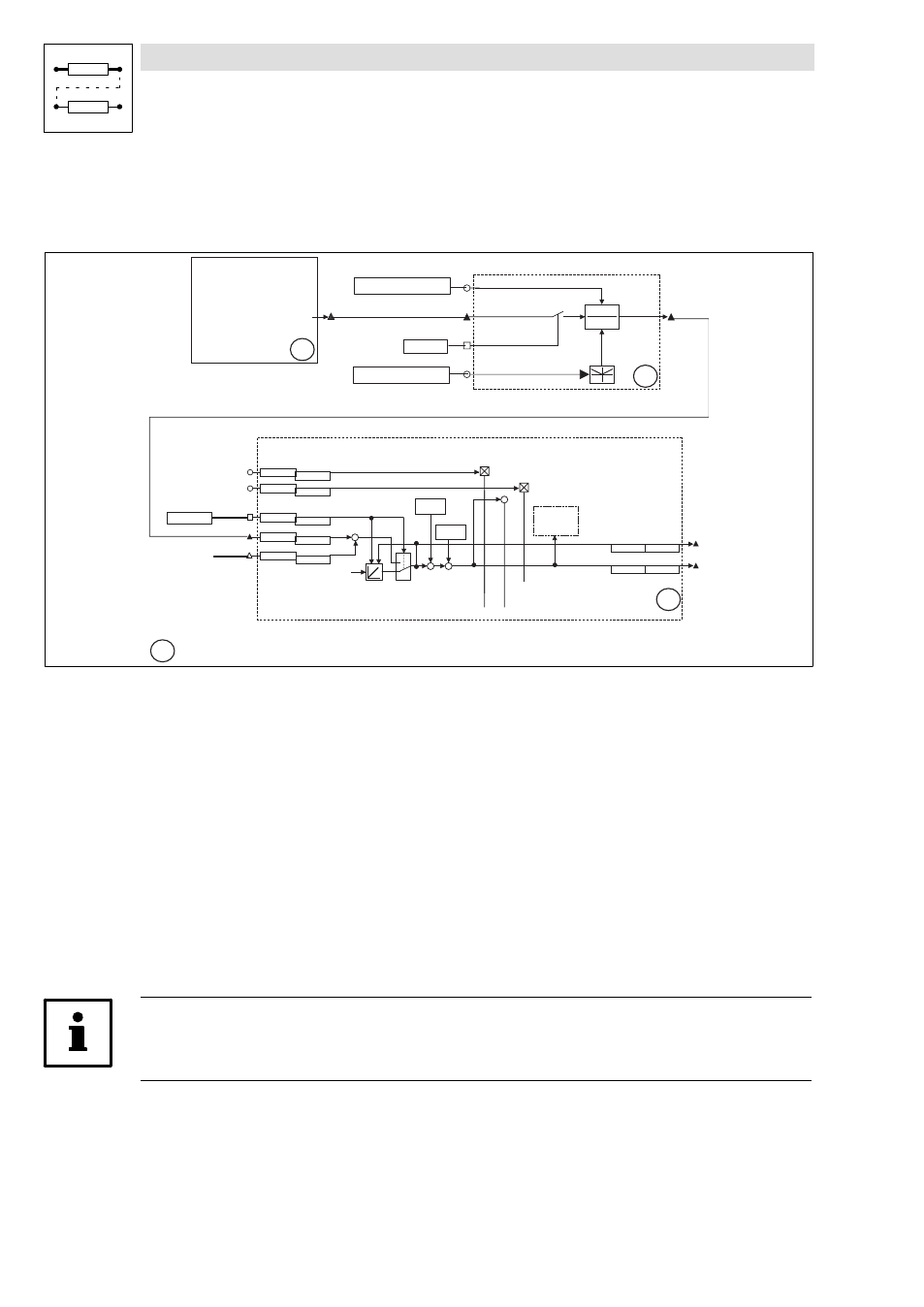
Fig. 3−14
Absolute value encoder via system bus (CAN)
Function
l
All absolute value encoders with a CAN interface to specification CAL DS−301" (CAN open)
can be used.
l
The CAN parameters, especially CAN baud rate, CAN identifier, and cycle time are to be set
accordingly. The set CAN parameters must be storable in the encoder!
l
The absolute value read via, for instance, CAN−IN3.D1 is sent to the input POS−ABS−IN".
l
Input POS−ABS−SET" is assigned to 1 signal (e.g.: FIXED1) and thus the acceptance of the
absolute value at input POS−ABS−IN is activated.
l
POS−ABS−SET = HIGH sets the homing status REF−OK" automatically, homing is therefore
not necessary.
l
The encoder resolution is adapted to the internal position resolution of 65536 inc/rev via the
function block CONVPHPH2. The adaptation factor is entered via the free codes C473/4 and
C473/5.
Tip!
The input POS−PHI−ADD and the output POS−ABS−VAL are available as of firmware version
³ 2.5