Function library, Ps 01 ps 02 – Lenze EVS9332xP User Manual
Page 107
Function library
Positioning control
3.4.13
Program sets (PS)
3−79
l
EDSVS9332P−EXT DE 2.0
3.4.13.3
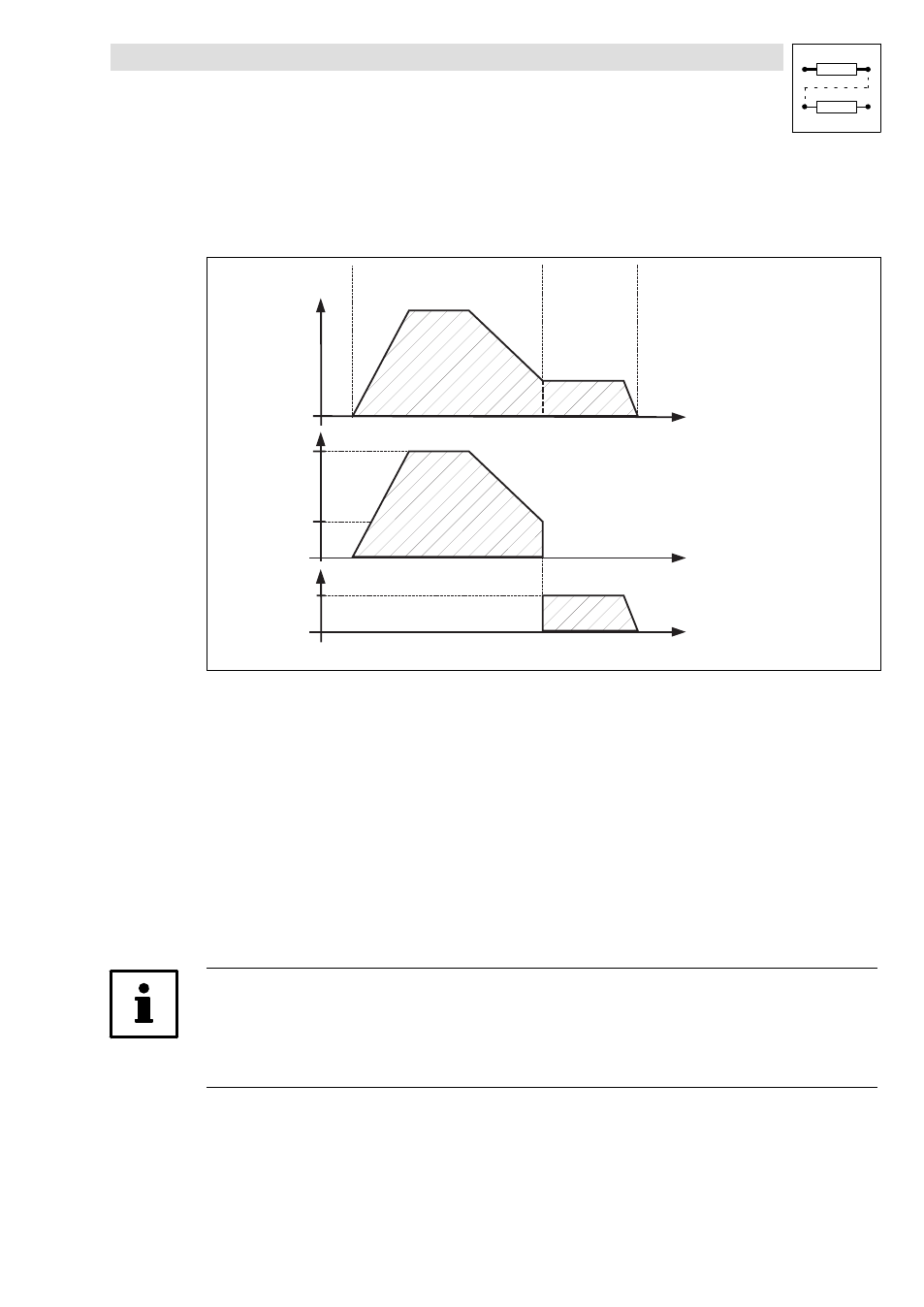
Point−to−point positioning with changeover of velocity
Purpose
l
Velocity changeover between two positioning processes without stopping.
t
t
t
v
PS 01
PS 02
Accele-
ration 01
v-Traversing 01
Deceleration 01
Target position 01
Final speed 01
v-Traversing 02
Target
position 02
Decele-
ration 02
9300pos056
Fig. 3−30
Point−to−point positioning with velocity changeover
Function
l
PS mode (C1311): Select Absolute PS" or Relative PS".
l
The travel profiles of two subsequent positioning processes are set as in point−to−point
positioning except that one final speed is unequal 0. The final speed is reached when the
target position is reached. Positioning will start at this speed. Positioning will start at this
speed.
Select target position from VTPOS" (selection under C1312/x)
Select traversing speed from VTVEL" (selection under C1313/x)
Select acceleration from VTACC" (selection under C1314/x)
Select deceleration from VTACC" (selection under C1315/x)
Select final speed from VTVEL" (selection under C1316/x)
l
Point−to−point positioning is possible with the positioning modes (C1210) absolute" and
relative positioning".
Tip!
If a PS with final speed unequal 0 is not followed by a positioning, for instance because of a jump
to Program end" or the function Wait for input", the fault message P09 (impermissible
programming) will be activated. The drive brakes to standstill.