Process data transfer, Status word for 93xx, Fig. 9−6 function blocks aif−out and aif−out – Lenze EMF2178IB User Manual
Page 60: Aif−out
Process data transfer
Cyclic process data objects
Process data signals of Lenze controllers
l
60
EDSMF2178IB EN 3.0
Status word for 93XX
9300
9300 servo inverter
9300
position
controller
9300
cam profiler
9300 vector
C0005
1xx3
4xx3
5xx3
6xx3, 7xx3
2xx3
1xx3
1xxx, 2xxx,
3xxx, 5xxx,
10xxx,
11xxx
4xxx
6xxx, 7xxx,
8xxx, 9xxx
0
DCTRL−PAR1−0
DCTRL−PAR1−0
DCTRL−PAR1−0
DCTRL−PAR1−0
Not assigned
CERR1−ERR
DCTRL−PAR1−0
DCTRL−PAR1−0
DCTRL−PAR1−0
1
DCTRL−IMP
DCTRL−IMP
DCTRL−IMP
DCTRL−IMP
DCTRL−IMP
DCTRL−IMP
DCTRL−IMP
DCTRL−IMP
DCTRL−IMP
2
MCTRL−IMAX
MCTRL−IMAX
REF−OK
REF−OK
POS−REF−OK
MCTRL−IMAX
MCTRL−IMAX
MCTRL−IMAX
MCTRL−IMAX
3
MCTRL−MMAX
Not assigned
MCTRL−MMAX
Not assigned
Not assigned
MCTRL−MMAX
MCTRL−MMAX
MCTRL−IMAX
negated
MCTRL−MMAX
4
NSET−RFG−I=0
MCTRL−IMAX
negated
NSET−RFG−I=0
MCTRL−IMAX
negated
MCTRL−MMAX
negated
DCTRL−TRIP
NSET−RFG−I=0
NSET−RFG−I=0
NSET−QSP−OUT
5
QMIN
QMIN
REF−BUSY
REF−BUSY
POS−IN−TARGET
CDATA−X0
QMIN
QMIN
QMIN
6
DCTRL−NACT=0
DCTRL−NACT=0
DCTRL−NACT=0
DCTRL−NACT=0
DCTRL−NACT=0
DCTRL−NACT=0
DCTRL−NACT=0
DCTRL−NACT=0
DCTRL−NACT=0
7
DCTRL−CINH
DCTRL−CINH
DCTRL−CINH
DCTRL−CINH
DCTRL−CINH
DCTRL−CINH
DCTRL−CINH
DCTRL−CINH
DCTRL−CINH
8 ... 11
Device status:
0b0000 = 0
0b0010 = 2
0b0011 = 3
0b0100 = 4
0b0101 = 5
0b0110 = 6
0b0111 = 7
0b1000 = 8
0b1010 = 10
Device initialisation
Switch−on inhibit
Operation inhibited
Flying restart circuit active
DC injection brake active
Operation enabled
Message active
Fault active
Fail−QSP (only 9300 servo position controller)
12
DCTRL−WARN
DCTRL−WARN
DCTRL−WARN
DCTRL−WARN
DCTRL−WARN
DCTRL−WARN
DCTRL−WARN
DCTRL−WARN
DCTRL−WARN
13
DCTRL−MESS
DCTRL−MESS
DCTRL−MESS
DCTRL−MESS
DCTRL−MESS
DCTRL−MESS
DCTRL−MESS
DCTRL−MESS
DCTRL−MESS
14
DCTRL−CW/CC
W
DCTRL−CW/CC
W
DCTRL−CW/CC
W
Not assigned
DCTRL−AIFL−QS
P
DCTRL−CW/CC
W
DCTRL−CW/CC
W
DCTRL−CW/CC
W
DCTRL−CW/CC
W
15
DCTRL−RDY
DCTRL−RDY
DCTRL−RDY
DCTRL−RDY
DCTRL−RDY
DCTRL−RDY
DCTRL−RDY
DCTRL−RDY
DCTRL−RDY
A I F - O U T
S
ta
tu
s
w
or
d
B i t 0
B i t 1 5
B i t 0
B i t 3 1
B
yt
e
7,
8
B
yt
e
5,
6
B
yt
e
3,
4
1
0
2
C 0 8 5 3
1
0
2
C 0 8 5 2
A I F - O U T . D 1
1 6 B i t
L o w W o r d
1 6 B i t
H i g h W o r d
C 0 8 5 1
1 6 B i t
L o w W o r d
1 6 B i t
H i g h W o r d
C 0 8 5 9
F D O - 0
A I F - O U T . W 1
C 0 8 5 0 / 1
C 0 8 5 8 / 1
F D O - 1 5
...
A I F - O U T . W 2
C 0 8 5 0 / 2
A I F - O U T . W 3
C 0 8 5 0 / 3
C 0 8 5 8 / 2
C 0 8 5 8 / 3
S T A T . B 0
D C T R L - I M P
...
S T A T . B 1 5
S T A T . B 1 4
1 6 B i t
F D O
C 0 1 1 6 / 1
C 0 1 1 6 / 1 6
F D O - 1 6
F D O - 3 1
...
C 0 1 1 6 / 1 7
C 0 1 1 6 / 3 2
B i t 0
B i t 1 5
C 0 1 5 6 / 1
S T A T
C 0 1 5 6 / 6
C 0 1 5 6 / 7
:
A I F - O U T *
)
S
ta
tu
s
w
or
d
B i t 0
B i t 1 5
B i t 0
B i t 3 1
B
yt
e
7,
8
B
yt
e
5,
6
X 1
B
yt
e
3,
4
1
0
2
C 0 8 5 3
1
0
2
C 0 8 5 2
A I F - O U T . D 1
1 6 B i t
L o w W o r d
1 6 B i t
H i g h W o r d
C 0 8 5 1
1 6 B i t
L o w W o r d
1 6 B i t
H i g h W o r d
C 0 8 5 9
F D O - 0
A I F - O U T . W 1
C 0 8 5 0 / 1
C 0 8 5 8 / 1
F D O - 1 5
...
A I F - O U T . W 2
C 0 8 5 0 / 2
A I F - O U T . W 3
C 0 8 5 0 / 3
C 0 8 5 8 / 2
C 0 8 5 8 / 3
S T A T . B 0
D C T R L - I M P
...
S T A T . B 1 5
S T A T . B 1 4
1 6 B i t
F D O
C 0 1 1 6 / 1
C 0 1 1 6 / 1 6
F D O - 1 6
F D O - 3 1
...
C 0 1 1 6 / 1 7
C 0 1 1 6 / 3 2
B i t 0
B i t 1 5
C 0 1 5 6 / 1
S T A T
C 0 1 5 6 / 6
C 0 1 5 6 / 7
0
3
C 0 8 5 4
3
A I F - O U T . D 2
C 1 1 9 5
C 1 1 9 6
1 6 B i t
L o w W o r d
1 6 B i t
H i g h W o r d
2111IBU002
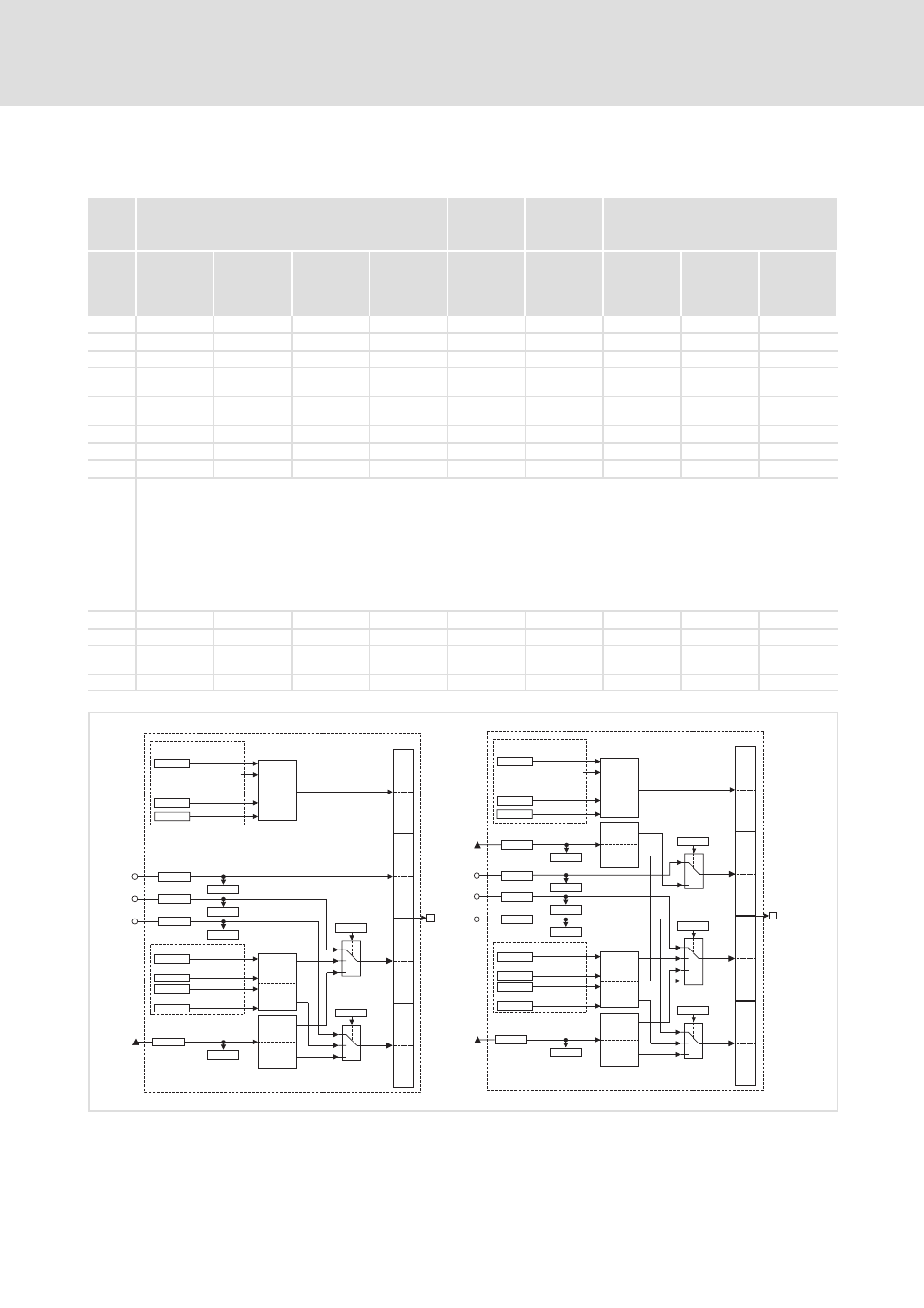
Fig. 9−6
Function blocks AIF−OUT and AIF−OUT
*)
AIF−OUT
*)
is available for the 9300 technology variants servo inverter, positioning controller and
cam profiler as of software version 2.0. AIF−OUT.D2 is new.