Sel language, Hold(hold: axis temporary stop) – IAI America DS-S-C1 User Manual
Page 70
68
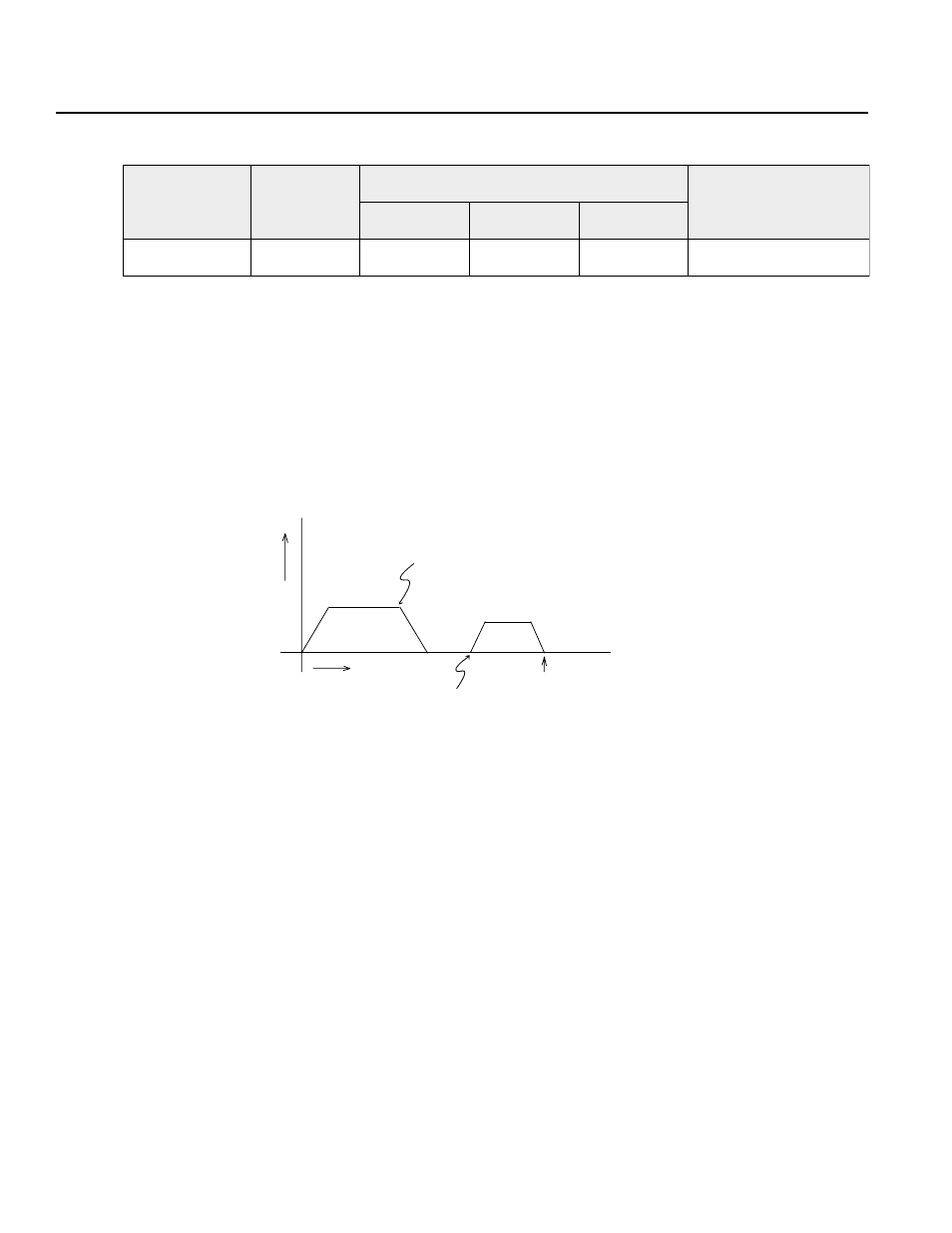
Input 25 ON
HOLD
t
Input 25 OFF
V
Motion
Completed
Remaining
motion
[Function]
Designates an input port for sending a command to decelerate and stop while a move command is being
executed. If the designated input port turns ON, then velocity decreases until all motion stops. When the
input port turns OFF, then motion begins again. The HOLD command applies only to the axes in the
designated task (program), and does not affect axes running in other programs.
[Example]
HOLD
25
When input port 25 turns ON, velocity decreases until all motion stops.
* When the HOLD function is used during PATH, CIR, ARC motion commands, the actuator stops at the next
position. During the execution of straight line motion commands such as MOVL, MOVP, it stops immediately.
* The IA system uses a unique homing sequence which locks the servo and detects the stroke edge during
homing. If the HOLD is activated at the end of homing, this might cause a "servo run-away = alarm" after the
HOLD is released. Therefore, HOLD should be designated after the HOME command. If you need to desig-
nate HOLD from the beginning, a home area detection switch (an area limit switch) must be installed so that
the HOLD designation will not be carried out in this area.
* HOLD and CANC cannot be used in the same program. (If both are written in the same program, the command
that is designated later is the one that becomes effective).
n
o
i
s
n
a
p
x
E
n
o
i
t
i
d
n
o
c
)
R
O
·
D
N
A
(
t
u
p
n
I
n
o
i
t
i
d
n
o
c
)
g
a
l
F
·
O
/
I
(
d
n
a
m
m
o
C
t
s
o
P
)
g
a
l
F
·
t
r
o
p
t
u
p
t
u
O
(
d
n
a
m
m
o
C
1
d
n
a
r
e
p
O
2
d
n
a
r
e
p
O
l
a
n
o
i
t
p
O
l
a
n
o
i
t
p
O
D
L
O
H
g
a
l
F
·
O
/
I
●
HOLD(Hold: Axis Temporary Stop)
12. SEL Language