Multi-Contact MA301 User Manual
Page 17
B
A
Zuleitungsseite
Supply cable side
Côté alimentation
Roboterseite / Robot side / Côté robot
Flanschmontage
RobiFix-B35-FZEM /
30.4051 (A) und
--> Zuleitung am
Roboter Achse 1
RobiFix-
S35-FZEE / 30.4039 (B)
mit Flansch-platte.
--> im Roboter Achse 1
A
B
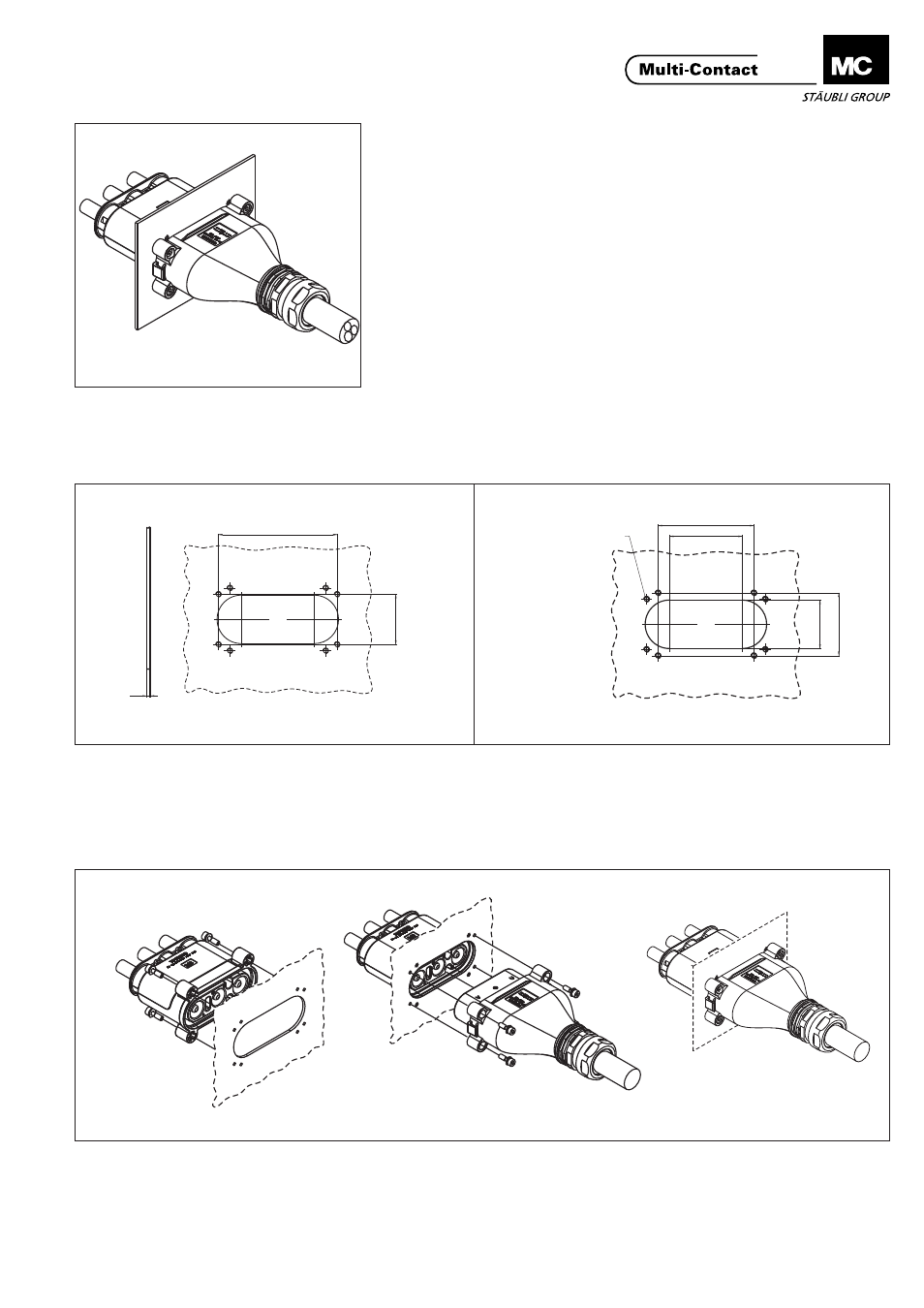
Bohrplan Flanschplatte
Flanschplatte gemäss
Bohrplan fertigen.
(ill.47)
Bohrplan A für RobiFix–B35-FZEM
Zuleitung am Roboter Achse 1
(ill.48)
Bohrplan B für RobiFix–S35-FZEE im
Roboter Achse1
ill.46
ill.48
ill.47
(ill.49)
Konfektionierter Steckverbinder RobiFix-
S35-FZEE
an die Flanschplatte positio-
nieren und M5 Zylinderschrauben mit
Drehmomentschlüssel anziehen.
(Anzugsdrehmoment 3Nm)
ill.49
Montage Seite B / Assembly side B / Montage côté B
RobiFix S-35-FZEE
Roboterseite (B)
Robot side (B)
Côté robot (B)
Zuleitungsseite (A)
Supply cable side (A)
Côté alimentation (A)
(ill.47)
Drilling plan A for RobiFix–B35-FZEM
supply lead on robot axis 1
(ill.48)
Drilling plan B for RobiFix–S35-FZEE in
robot axis 1
(ill.47)
Plan de perçage A pour RobiFix–B35-
FZEM câble d’alimentation axe 1 du
robot.
(ill.48)
Plan de perçage B pour RobiFix–S35-
FZEE à l’intérieur du robot
(ill.49)
Position assembled plug connector
RobiFix-S35-FZEE on the flange plate and
tighten M5 cylindrical-head screws with
torque wrench. (Tightening torque 3Nm)
(ill.49)
Positionner le connecteur RobiFix-S35-
FZEE confectionné sur la façade et serrer
les vis à tête cylindrique M5 avec une clé
dynamométrique.
(Couple de serrage 3 Nm)
Drilling plan for flange
plate
Make flange plate
according to drilling plan.
Plan de perçage de la façade
Usiner la façade selon le
plan de perçage.
Flange mounting
RobiFix-B35-FZEM /
30.4051 (A) and RobiFix-
S35-FZEE / 30.4039 (B)
with flange plate.
--> supply lead on robot
axis 1
A
B --> in robot Axis 1
Montage en façade
RobiFix-B35-FZEM /
30.4051 (A) et RobiFix-
S35-FZEE / 30.4039 (B)
sur cloison au pied du
robot.
--> Câble d’alimentation
axe 1 du robot
A
B --> Axe 1 à l’intérieur du
robot
www.multi-contact.com
17/28
www.multi-contact.com
Advanced Contact Technology
84
±0.2
64
±0.1
8xM5
42.5
±0.2
55
±0.2
A
104
-0.5
0
44
±0.2
3
±0.2
B