Basic setup (cont.) – Rockwell Automation 1560E SMC Flex Smart Motor Controller User Manual
Page 92
4-12
Programming
1560E-UM050B-EN-P - June 2013
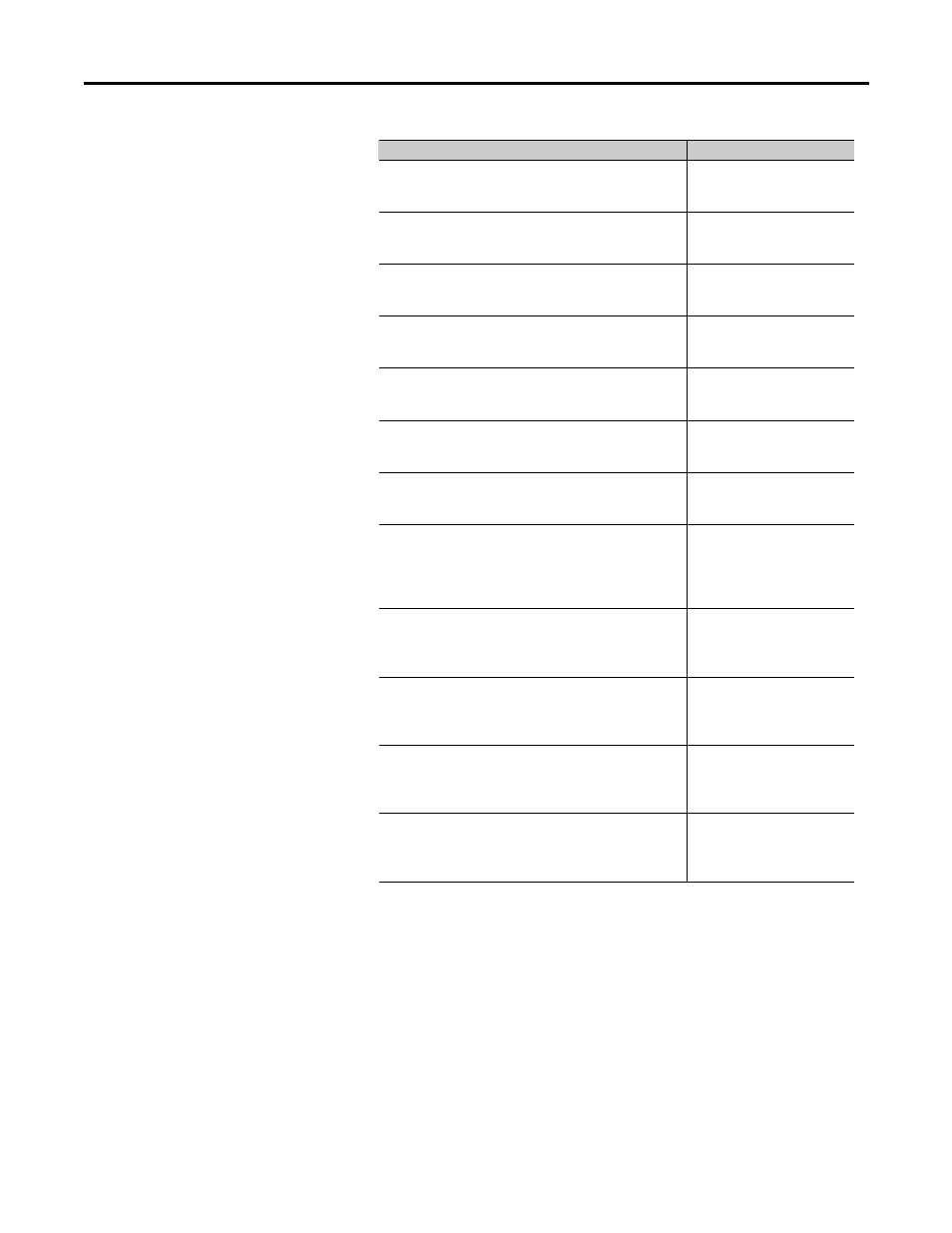
Parameter
Option
Current Limit Level v
The current limit level that is applied for the Ramp
time selected.
50 to 600% FLC
Kickstart Time
A boost current is provided to the motor for the
programmed time period.
0.0 to 2.0 s
Kickstart Level
Adjusts the amount of current applied to the motor
during kickstart.
0 to 90% of locked rotor
torque
Option 2 Input
Allows the user to select a Dual Ramp or Preset
Slow Speed (SS).
Disable, Preset SS,
Dual Ramp
Emergency Run x
Stop Mode
Allows the user to program the SMC-Flex controller
for the type of stopping that best fits the application.
Disable, Soft Stop,
Linear Speed
Stop Time
This sets the time period which the controller will
ramp the voltage during a stopping maneuver.
0.0 to 120 s
CT Ratio
Scales the CT input to actual motor current
(5 amp secondary assumed)
1 to 1500
Aux1 Config
N.O. contact is provided as standard with the
SMC-Flex controller. This contact is located at
terminals 19 and 20. Aux Contacts 1 allows the
user to configure the operation of the contacts.
Normal, Up-to-speed/Bypass
Fault Contact
A fault auxiliary contact is provided between terminals
29 and 30. Fault Contact allows the user to program
the operation of the contact for a fault condition.
N.O., N.C.
Alarm Contact
An alarm contact is provided between terminals 31
and 32. Alarm contact allows the user to program
the operation of the contact for an Alarm condition.
N.O., N.C.
Aux2 Config
This parameter provides the user with the ability to
program the “Normal” state of the second auxiliary
contact. This contact is located at terminals 33 and 34.
N.O., N.C.
Parameter Mgmt w
The newly programmed parameters’ values can be
saved to memory, or the factory default parameter
values can be recalled.
Ready, User Store, User
Recall, Load Default
v
Starting Mode must be programmed to Current Limit to obtain access to the Current Limit Level
parameter.
w
The new programmed parameter values will not be stored to the EEPROM without the user’s
direction in Parameter Management: User Store.
x
When programmed for ‘Emergency Run’ and the Option 2 input is energized, a ‘Start’ command
will first close the bypass contactor, then the line contactor for an across-the-line start of the motor.
A ‘Stop’ command will open the line contactor first and allow the motor to coast, regardless of the
programmed ‘Stop Mode’. For Pump Option modules, the Option 2 input defaults to ‘Emergency
Run’ for MV applications.
Basic Setup (cont.)