Status indication, Control options, Pump control option – Rockwell Automation 1560E SMC Flex Smart Motor Controller User Manual
Page 29
Product Overview
1-19
Status Indication
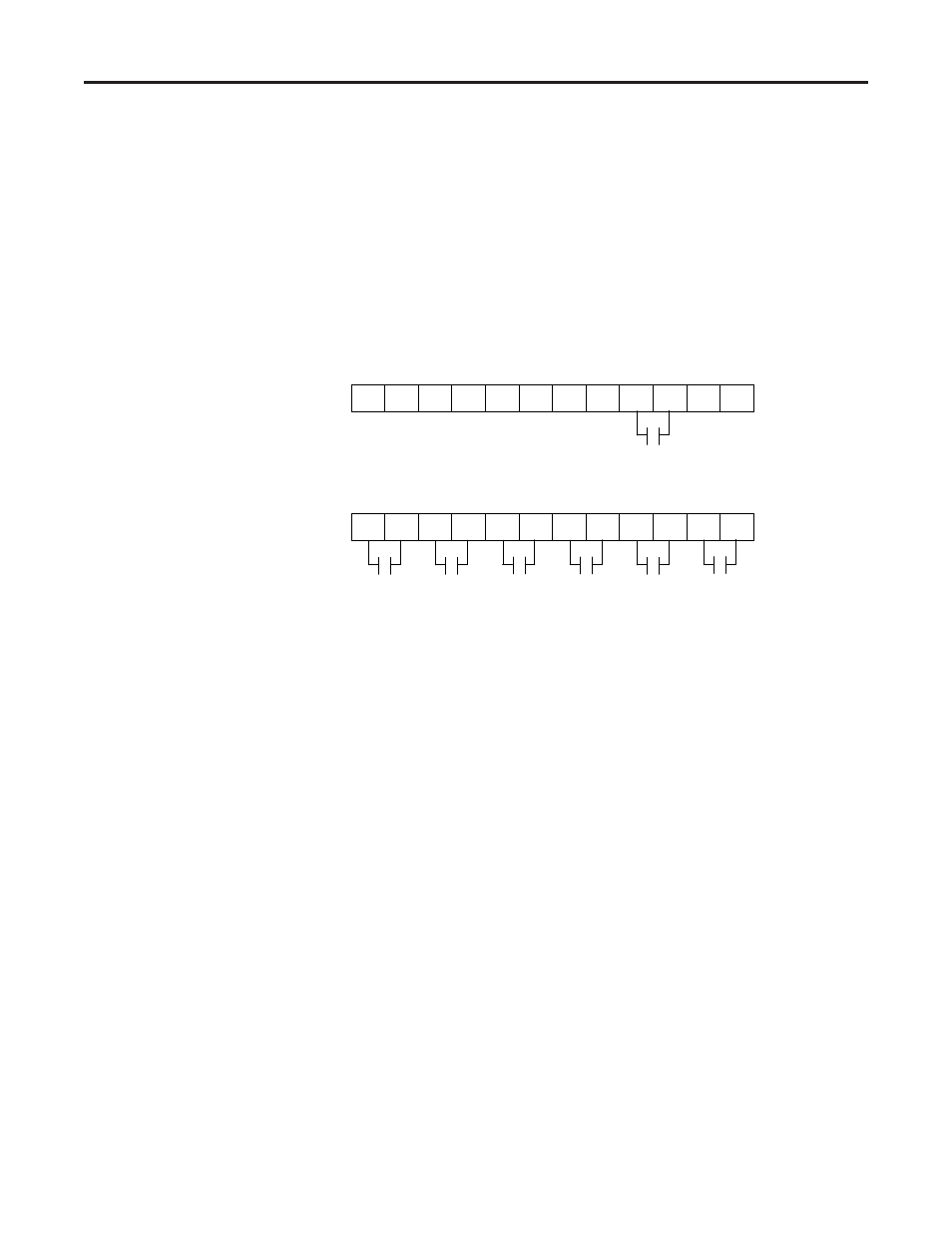
Four programmable hard contact outputs are provided as standard:
• The Auxiliary #1 Contact is N.O. It is always programmed for
Up-to-speed to control the bypass contactor in MV applications.
• The fault Contact is for fault indication and is programmable for N.O./N.C.
• The alarm Contact is for alarm indication and is programmable for N.O./N.C.
• The Auxiliary #2 Contact is for normal indication and is programmable
for N.O./N.C. For MV applications, it is configured as N.O. to control
the line contactor.
11
12
13
14
15
16
17
18
19
20
21
22
SMC-Flex
Control Terminals
Aux #1
Up-to-Speed
23
24
25
26
27
28
29
30
31
32
33
34
PTC
Input
TACH
Input
Ground
Fault
Fault
Contact
Alarm
Contact
Aux #2
Normal
11
12
13
14
15
16
17
18
19
20
21
22
SMC-Flex
Control Terminals
Aux #1
Up-to-Speed
23
24
25
26
27
28
29
30
31
32
33
34
PTC
Input
TACH
Input
Ground
Fault
Fault
Contact
Alarm
Contact
Aux #2
Normal
Figure 1.16 – Control Terminals
Control Options
The MV SMC-Flex™ controller offers the control options described below.
Important: The options listed in this section are mutually exclusive and
must be specified when ordering. An existing controller may be upgraded
to another control option by replacing the control module and possibly other
components. Consult your nearest Rockwell Automation sales office.
Pump Control Option
This option reduces surges during the starting and stopping of a centrifugal
pump by smoothly accelerating and decelerating the motor. The micro-
processor analyzes the motor variables and generates commands that control
the motor and reduce the possibility of surges occurring in the system.
The motor current will vary during the acceleration period, and may be
near the motor rated starting current. The pump algorithm does not limit
starting current since full voltage is needed to reach full speed with a
loaded motor.
The starting time is programmable from 0-30 seconds, and the stopping
time is programmable from 0-120 seconds.