3 process data telegram, 4 assignment of the user data to variables, Process data telegram – Lenze DDS System bus CAN for PLC User Manual
Page 91: Assignment of the user data to variables, System bus (can) for lenze plc devices, Can system blocks
System bus (CAN) for Lenze PLC devices
CAN system blocks
7.1
CAN1_IO (node number: 31) − 9300 Servo PLC
7−3
L
PLC−Systembus EN 2.0
7.1.3
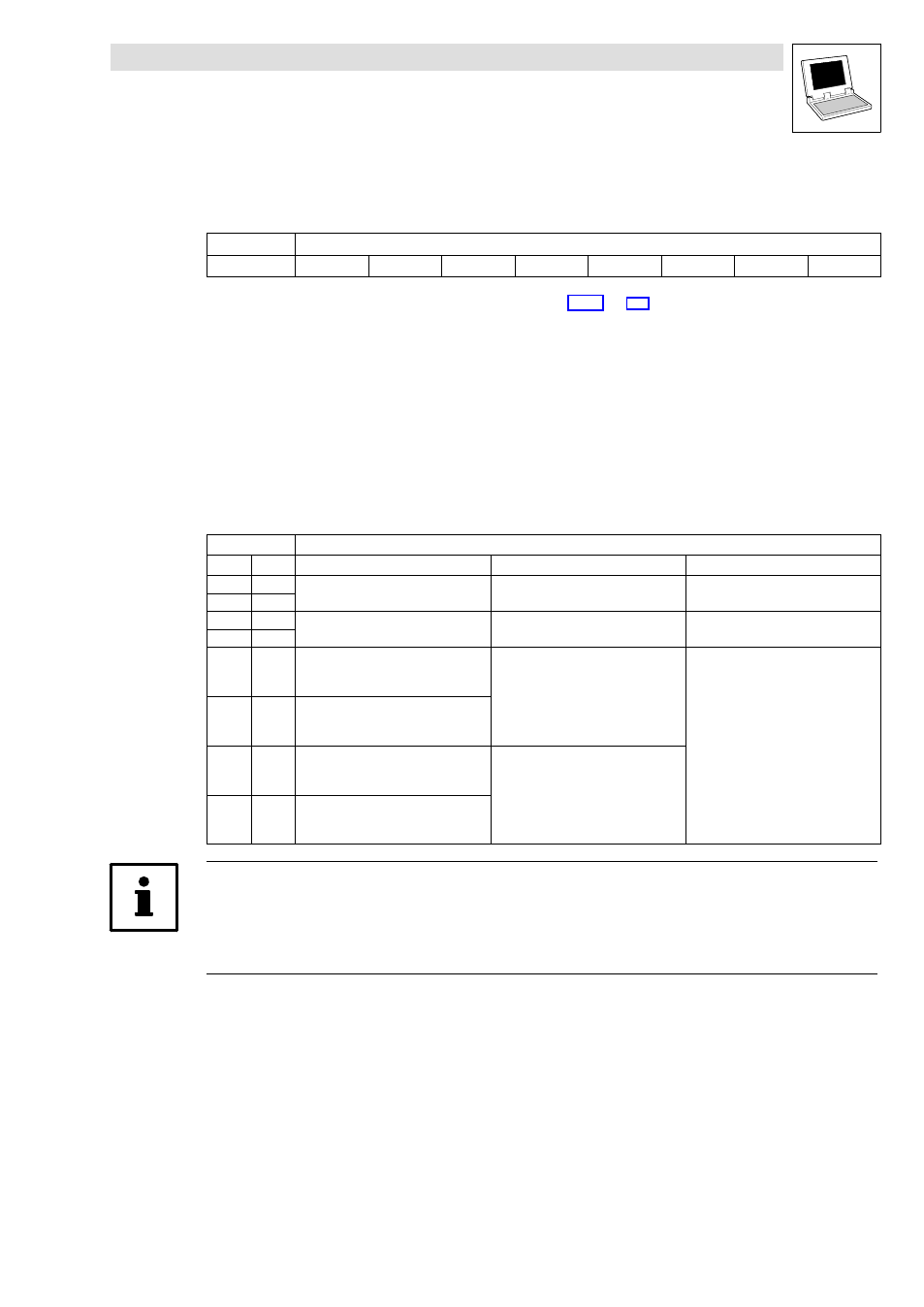
Process data telegram
The process data telegram consists of an identifier and 8 bytes of user data.
11bit
8 bytes user data
Identifier
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7
Byte 8
Information on the identifier can be found in chapter 2.4.1.
(
7.1.4
Assignment of the user data to variables
Several variables of different data types are assigned to the user data to be transmitted and received.
Thus, the data in the PLC program can be optionally interpreted as:
·
binary information (1 bit)
·
status word/quasi−analog value (16 bit)
·
angle information (32 bit)
Variables for user data to be transmitted
User data
Assigned variables
Byte
Bit
Variable (1 bit)
Variable (16 bit)
Variable (32 bit)
1
0...7
CAN1_wDctrlStat
2
0...7
3
0...7
CAN1_nOutW1_a
4
0...7
5
0
...
7
CAN1_bFDO0_b
...
CAN1_bFDO7_b
CAN1_nOutW2_a
CAN1_dnOutD1_p
6
0
...
7
CAN1_bFDO8_b
...
CAN1_bFDO15_b
7
0
...
7
CAN1_bFDO16_b
...
CAN1_bFDO23_b
CAN1_nOutW3_a
8
0
...
7
CAN1_bFDO24_b
...
CAN1_bFDO31_b
Note!
Avoid simultaneous overwriting via different variable types to ensure data consistency.
For instance, if you want to write bytes 5 and 6, only use the variable CAN1_dnOutD1_p,
CAN1_nOutW2_a, or only the variables CAN1_bFDO0_b ... CAN1_bFDO15_b for this purpose!