System bus (can) for lenze plc devices, Lenzecandrv.lib function library – Lenze DDS System bus CAN for PLC User Manual
Page 155
System bus (CAN) for Lenze PLC devices
LenzeCanDrv.lib function library
10.8
L_CanPdoReceive − receiving a CAN object
10−13
L
PLC−Systembus EN 2.0
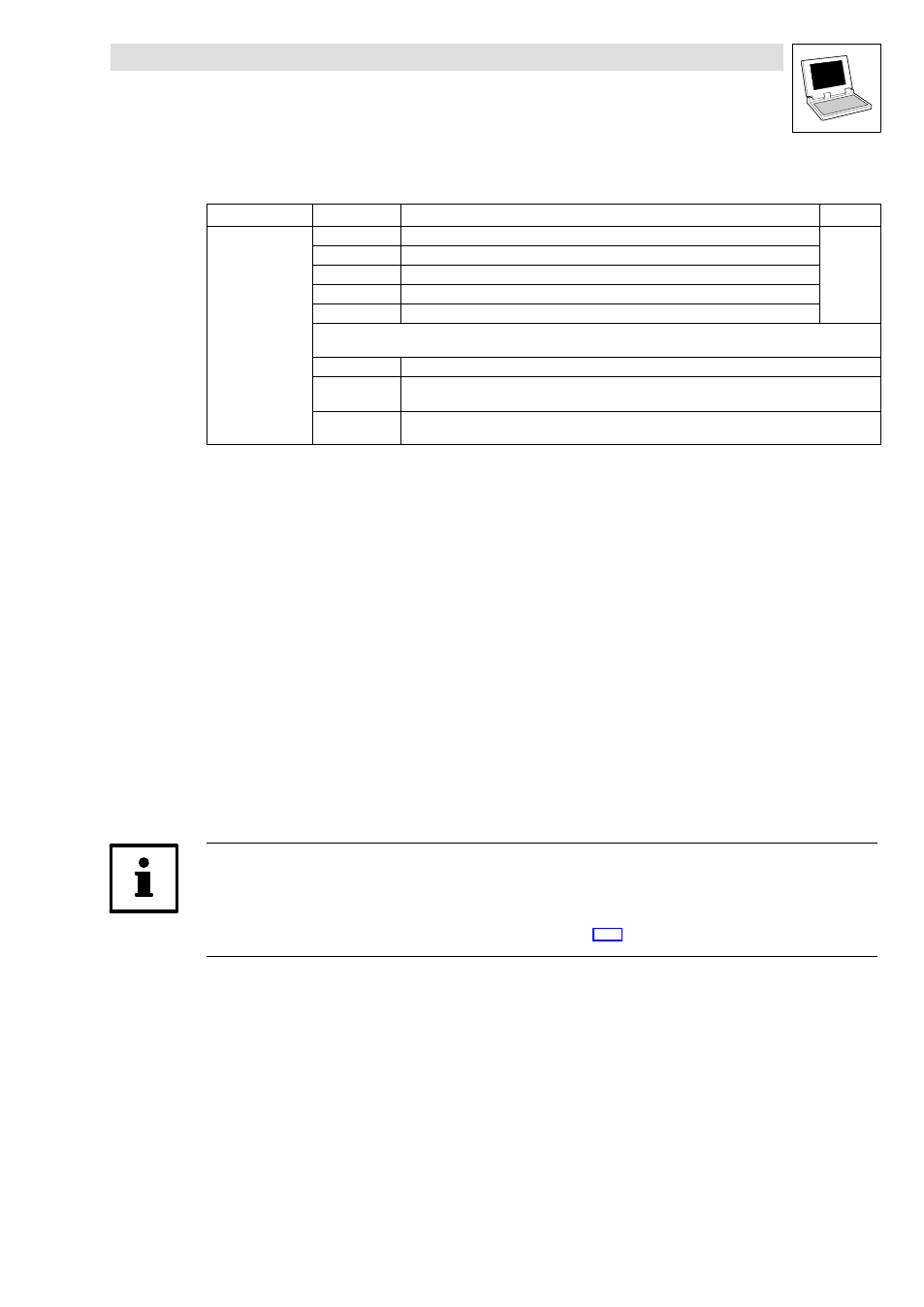
Receive status (nState)
Data type
Value
Meaning
Priority
Integer
−150
CAN bus is not in the Operational state.
1 (high)
−121
Incorrect driver number (wDrvNr)
2
−120
Driver not initialised
3
−12
The set message identifier (COB−ID) is beyond the permissible range (0 ... 2047).
4
−11
Pointer pIOAdress does not point to PLC−RAM.
5 (low)
* If there are several error causes, always the value associated with the error cause
of the highest priority is returned.
0
Data have been faultlessly received.
10
The specification for the telegram length byLen is higher than 8. The telegram length has been
limited to 8 bytes.
200
Data were received without resetting bNewMessage. Therefore valid data were possibly overwritten
in the receive memory.
Resetting the variable "bNewMessage"
If data have been received from the CAN bus, the output variable bNewMessage is set to TRUE and
only is reset to FALSE again by calling the action
(* FB instance *)
ReceiveFromID678:
L_CanPdoReceive; (* receive data *)
(* from identifier 678 *)
...
(* reset NewMessage information at FB ReceiveFromID678 *)
ReceiveFromID678.
ResetNewMessage; (* reset NewMessage *)
Example
Calling the function block in ST:
ReceiveFromID678(wDrvNr:=10,
byLen:=8,
dwCobID:=678,
pIOAdress:=
ADR(abyReceiveData);
Note!
The use of an address which is stored in the memory area of the operating system is not permitted
for the L_CanPdoTransmit and L_CanPdoReceiveFBs!
·
See also note to the function L_CanPdoTransmit.
(