2 user data, User data, System bus (can) for lenze plc devices – Lenze DDS System bus CAN for PLC User Manual
Page 17: General information
System bus (CAN) for Lenze PLC devices
General information
2−5
l
PLC−Systembus EN 2.0
2.4.2
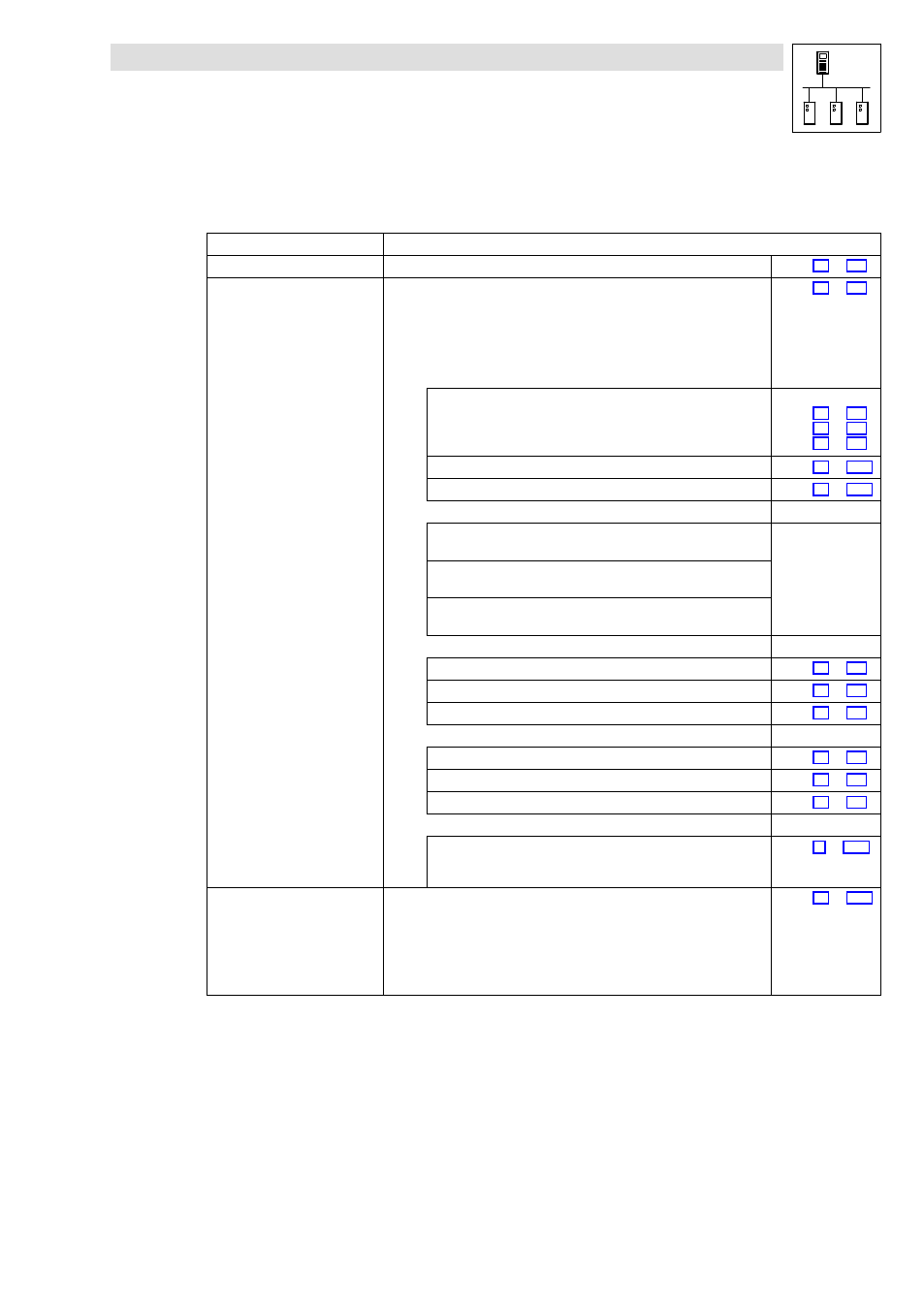
User data
Via the user data area of the CAN telegram, three different types of data are transported:
Data type
Information
Network management data
Information on the structure of communication via the CAN network.
Chapter 2.5(
^ 2−6)
Process data
Process data are data for control−oriented concerns, e. g. setpoints and actual
values.
·
Process data are transmitted as so−called PDOs (Process Data Objects) with a
high priority.
·
Process data are processed more quickly by the PLC as parameter data.
·
The transmission and reception of the process data is effected by the use of
specific system blocks or the free CAN objects:
Chapter 2.6(
^ 2−7)
CAN
(integrated
system bus interface)
SB CAN1_IO for cyclic process data (sync−controlled)
9300 Servo PLC:
Drive PLC:
ECSxA:
Chapter 7.1(
^ 7−1)
Chapter 7.2(
^ 7−6)
Chapter 7.2(
^ 7−6)
SB CAN2_IO for event− or time−controlled process data
Chapter 7.4(
^ 7−14)
SB CAN3_IO for event− or time−controlled process data
Chapter 7.5(
^ 7−17)
XCAN
(automation interface)
SB AIF1_IO_AutomationInterface
for cyclic process data (sync−controlled)
See Manual
·
9300 Servo PLC
·
Drive PLC
·
ECSxA
SB AIF2_IO_AutomationInterface
for event− or time−controlled process data
SB AIF3_IO_AutomationInterface
for event− or time−controlled process data
FIF−CAN
(function interface,
Drive PLC only!
SB FIF_CAN1_IO for cyclic process data (sync−controlled)
Chapter 8.1(
^ 8−1)
SB FIF_CAN2_IO for event− or time−controlled process data
Chapter 8.2(
^ 8−1)
SB FIF_CAN3_IO for event− or time−controlled process data
Chapter 8.3(
^ 8−1)
CAN−AUX
(integrated
system bus interface,
ECSxA only)
SB CANaux1_IO for cyclic process data (sync−controlled)
Chapter 9.1(
^ 9−1)
SB CANaux2_IO for event− or time−controlled process data
Chapter 9.2(
^ 9−1)
SB CANaux3_IO for event− or time−controlled process data
Chapter 9.3(
^ 9−1)
Free CAN objects
By using the functions/function blocks of the LenzeCanDrv.lib function
library, so−called "free CAN objects" additionally can be added to the
fixedly integrated CAN objects.
Chapter 10(
^ 10−1)
Parameter data
For Lenze devices, parameter data are the so−called codes.
·
Parameter settings for instance are carried out in the case of a one−time
setting of the system during commissioning, or in the case of a material
change of the production machine.
·
Parameter data are transferred as so−called SDOs (Service Data Objects) via
the CAN network and are acknowledged by the receiver, i. e. the transmitter
receives a feedback on whether the transmission was successful.
Chapter 2.7(
^ 2−11)