3 identification of the nodes, 4 structure of the can telegram, 1 identifier – Lenze DDS System bus CAN for PLC User Manual
Page 15: Identification of the nodes, Structure of the can telegram, Identifier, System bus (can) for lenze plc devices, General information
System bus (CAN) for Lenze PLC devices
General information
2−3
l
PLC−Systembus EN 2.0
2.3
Identification of the nodes
Assign a node address − also called Node ID − in the range of 1 to 63 to each node within the system
bus network as a definite identification.
·
The same node address may not be assigned more than once within the network.
2.4
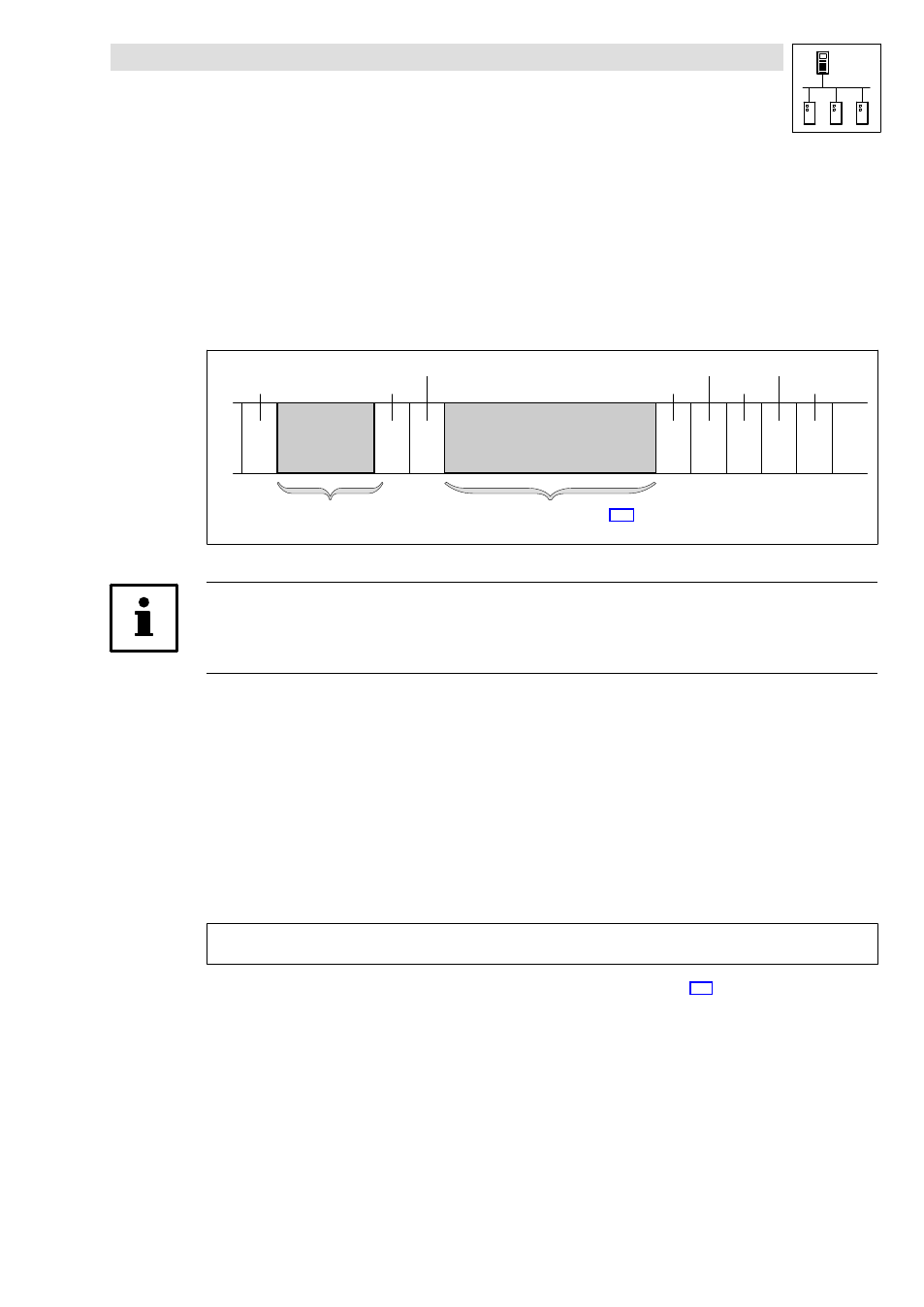
Structure of the CAN telegram
1 bit
11 bit
1 bit
6 bit
0 ... 8 byte
15 bit
Start
Identifier
RTR bit
Control field
User data
CRC
sequence
CRC delimit.
ACK slot
ACK delimit.
End
Description see chapter 2.4.1
·
Network management
·
Parameter data
·
Process data
Description see chapter 2.4.2
1 bit
1 bit
1 bit
7 bit
Fig. 2−1
Basic structure of a CAN telegram
Tip!
For the user only the identifier and the user data are relevant. All further data of the CAN telegram
are processed by the system.
2.4.1
Identifier
The principle of the CAN communication is based on a message−oriented data exchange between
a transmitter and many receivers. Thereby all nodes practically are able to transmit and receive at the
same time.
The control with regard to the node which is to receive a transmitted message is effected via the
so−called Identifier in the CAN telegram, also called COB−ID (Communication Object Identifier). For
purposes of addressing, the identifier additionally contains information on the priority of the
message, as well as on the type of the user data.
The identifier is composed of a so−called basic identifier and the node address of the node to be
activated:
Identifier + basic identifier ) node address
·
For Lenze devices, the node address is defined via code C0350.
(
^ 3−3)
·
For the network management and the sync telegram only the basic identifier is required.