System bus (can) for lenze plc devices, Lenzecandrv.lib function library – Lenze DDS System bus CAN for PLC User Manual
Page 152
10.7
L_CanPdoTransmit − transmitting a CAN object
System bus (CAN) for Lenze PLC devices
LenzeCanDrv.lib function library
10−10
L
PLC−Systembus EN 2.0
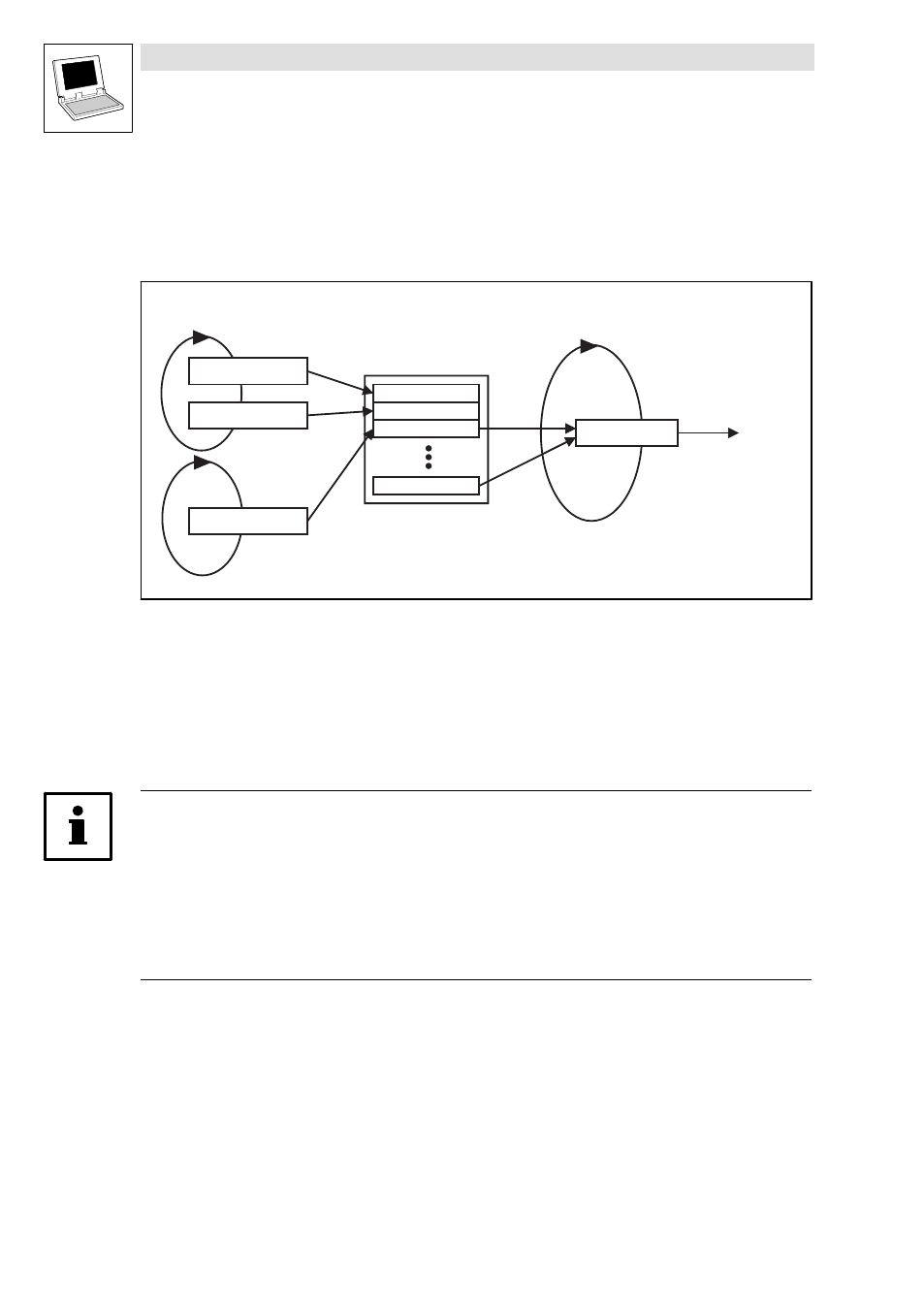
Transmit request memory as an interface between the CAN driver and the
L_CanPdoTransmitFB
As the data transmission via the CAN driver is effected simultaneously to the process of the PLC
program, a temporary storage for the transmit requests, the so−called transmit request memory, is
used between the CAN driver and the L_CanPdoTransmit FB.
L_CanPdoTransmit
L_CanPdoTransmit
Transmit request 1
CAN driver
System bus (CAN)
250 s cycle
m
PLC program
Operating system
Transmission request memory
L_ParWrite
Transmit request 2
Transmit request 3
Transmit request 64
·
Every time the L_CanPdoTransmit FB is called, a transmit request is stored in the transmit
request memory.
·
Transmit requests can also be stored in the transmit request memory using the L_ParWrite FB
of the LenzeDrive.lib function library.
·
The transmit request memory can buffer 64 transmit requests of the L_CanPdoTransmit or
L_ParWrite FBs at a total.
·
Every 250
ms, simultaneously to the process of the PLC program, a transmit request is
collected from the transmit request memory and is processed by the operating system.
Note!
If the transmit request memory due to a too frequent call of the L_CanPdoTransmit or L_ParWrite
FBs is filled up faster as it is emptied by the operating system which collects the transmit requests,
an overflow error will occur.
·
In the case of an overflow error, the variable nState receives the value "−119".
·
Additionally a corresponding error message is output by the operating system.
(See chapter "Error messages" in the Manual to the respective target system, e. g.
9300 Servo PLC, Drive PLC, or ECSxA).