3 fonctionnement et application, 4 transport et stockage, 3fonctionnement et application – Festo Модуль перемещения HSP User Manual
Page 96: 4transport et stockage
HSP−...−AP/A S
Festo HSP−...−AP/AS 0508a Français
96
3
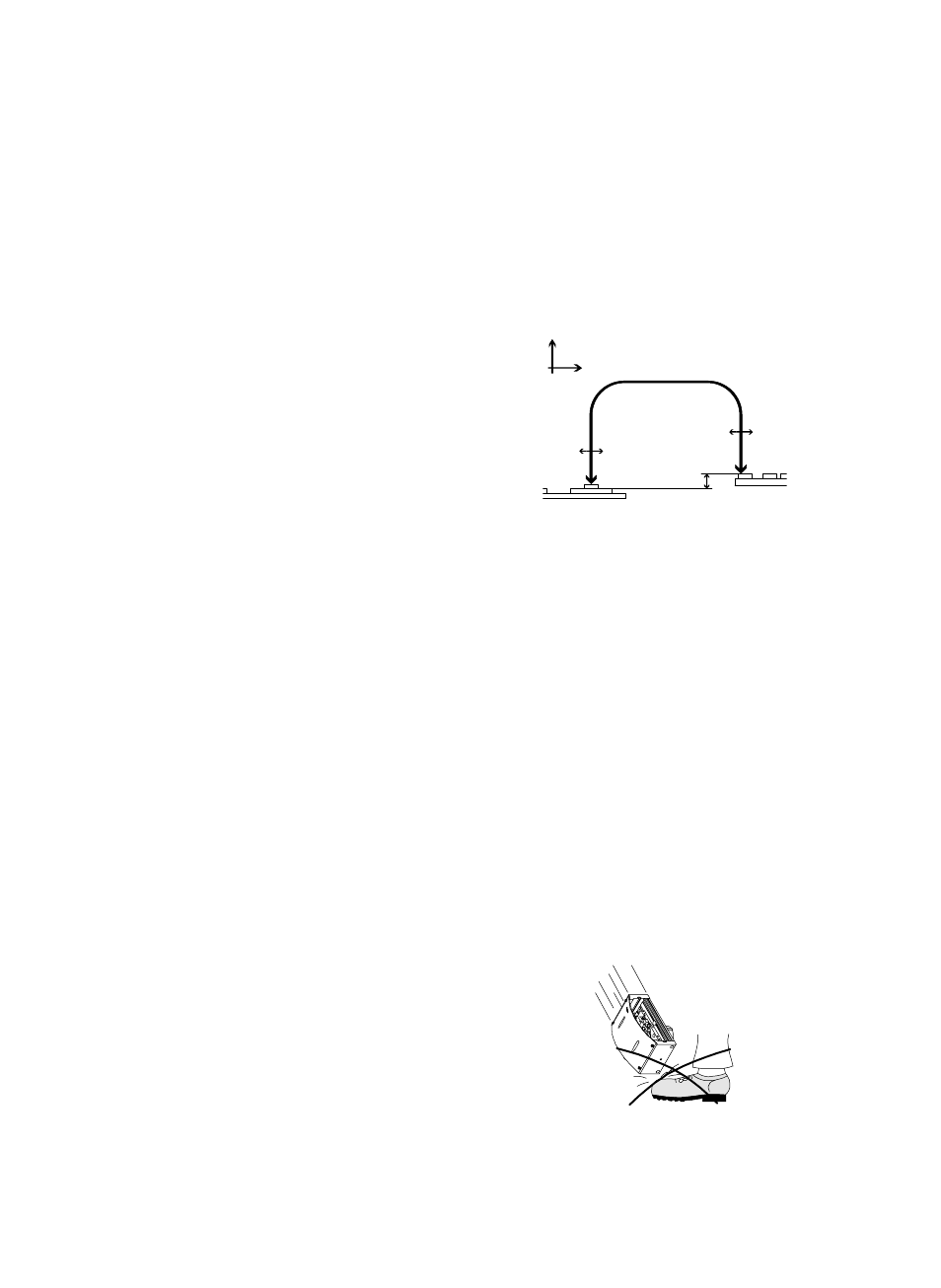
Fonctionnement et application
Par l’intermédiaire de la piste de guidage
4
et du guidage orthogonal
aB est créé un mouĆ
vement positif vertical et horizontal (piste y−z).
Les entretoises à ressort
1 montées sur les
butées de fin de course garantissent une
haute reproductibilité des positions.
En positions de fin de course, des amortisĆ
seurs hydrauliques et autoréglables
2 (uniĆ
quement type ...−AP) amortissent le mouveĆ
ment. Les positions de fin de course peuvent
être détectées à l’aide de capteurs de proxiĆ
mité de type SME/SMT−8...Ă. Il est possible
d’observer l’état des capteurs de proximité
avec le couvercle de corps monté par le reĆ
gard.
La course est réglée séparément pour les deux positions de fin de course (position
de prise et de dépose) :
ć
dans le sens y : via les vis de réglage des coulisses
3
ć
dans le sens z : via les vis de butée sur le rail de guidage vertical
5
Le module de manipulation HSP−... est prévu pour l’équipement en composants
automatique dans le domaine des techniques de manipulation et de montage.
Le HSP−... convient particulièrement à la manipulation de petites pièces à grande
vitesse par ex. pour la pose, le déplacement ou l’assemblage.
4
Transport et stockage
S
Tenir compte du poids du HSP−... Il peut
peser selon la taille dans l’exécution de
base jusqu’à 8,2 kg.
S
Tenir compte des recommandations
suivantes pour le stockage :
Durée de stockage
48 mois
Température de stockage
+ 20 °C
Fig. 2
z
y
Fig. 3