Festo Модуль перемещения HSP User Manual
Page 50
HSP−...−AP/A S
Festo HSP−...−AP/AS 0508a English
50
5. Open up the one−way flow control valves slowly again until the desired
positioning speed is reached.
6. Make sure that the pulse time does not drop below the minimum permitted
time.
Definition
Pulse time t
t
= positioning time t + dwell time t
e
t: Time which the HSP−... requires in order to move from the receive position to
the release position and back. (permitted values see chapter Characteristic
curves").
t
e
: Time during which the HSP−... remains in the receive position and release
position.
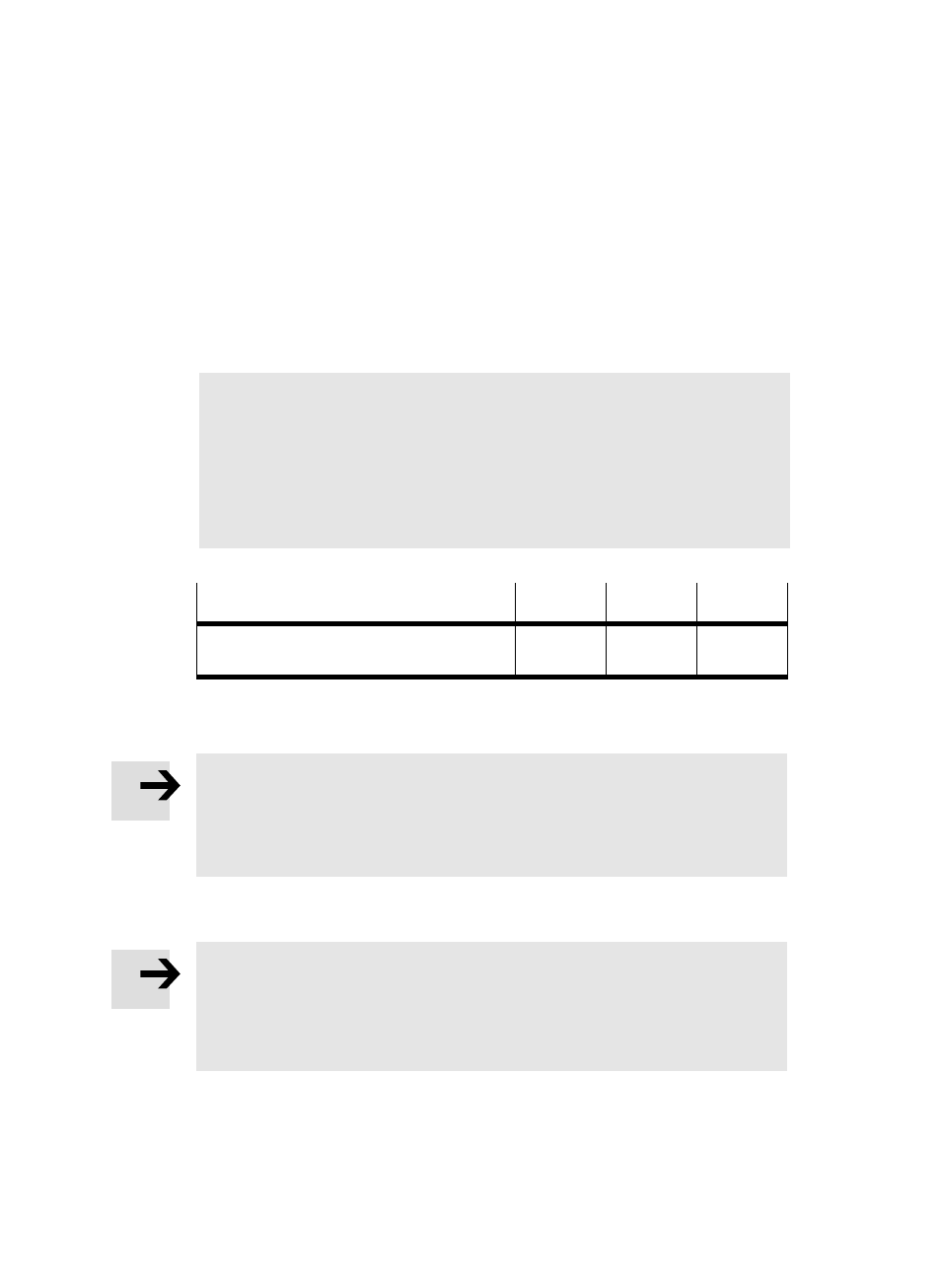
Type
HSP−12−...
HSP−16−...
HSP−25−...
Minimum permitted pulse time t
t
[s]
0.6
0.8
1
The HSP−... should reach the end position safely, but not strike hard against it.
Striking too hard causes the device to bounce back out of the end stop.
Please note
The tendency to vibrate increases if the speed at the start of cushioning is high.
The complete cycle time increases due to the reverberation time.
S Set the drive below the max. permitted speed at the start of cushioning. You
can then increase the end position accuracy.
When all corrections have been undertaken:
Please note
Before exhausting:
S Make sure that the gripper is not holding a work load.
In this way you can prevent a mass from sliding down when the device is
exhausted.
7. Conclude the test run. Exhaust the drive and the add−on components.