Exp. 11c: simple harmonic motion-beam on a spring, Theory, Exp. 11c: simple harmonic motion–beam on a spring – PASCO ME-9502 Statics System User Manual
Page 71
®
M o d e l N o . M E - 9 5 0 2
E x p . 1 1 C : S i m p l e H a r m o n i c M o t i o n – B e a m o n a S p r i n g
0 1 2 - 1 2 8 7 6 B
67
Exp. 11C: Simple Harmonic Motion–Beam on a Spring
Equipment Needed
Theory
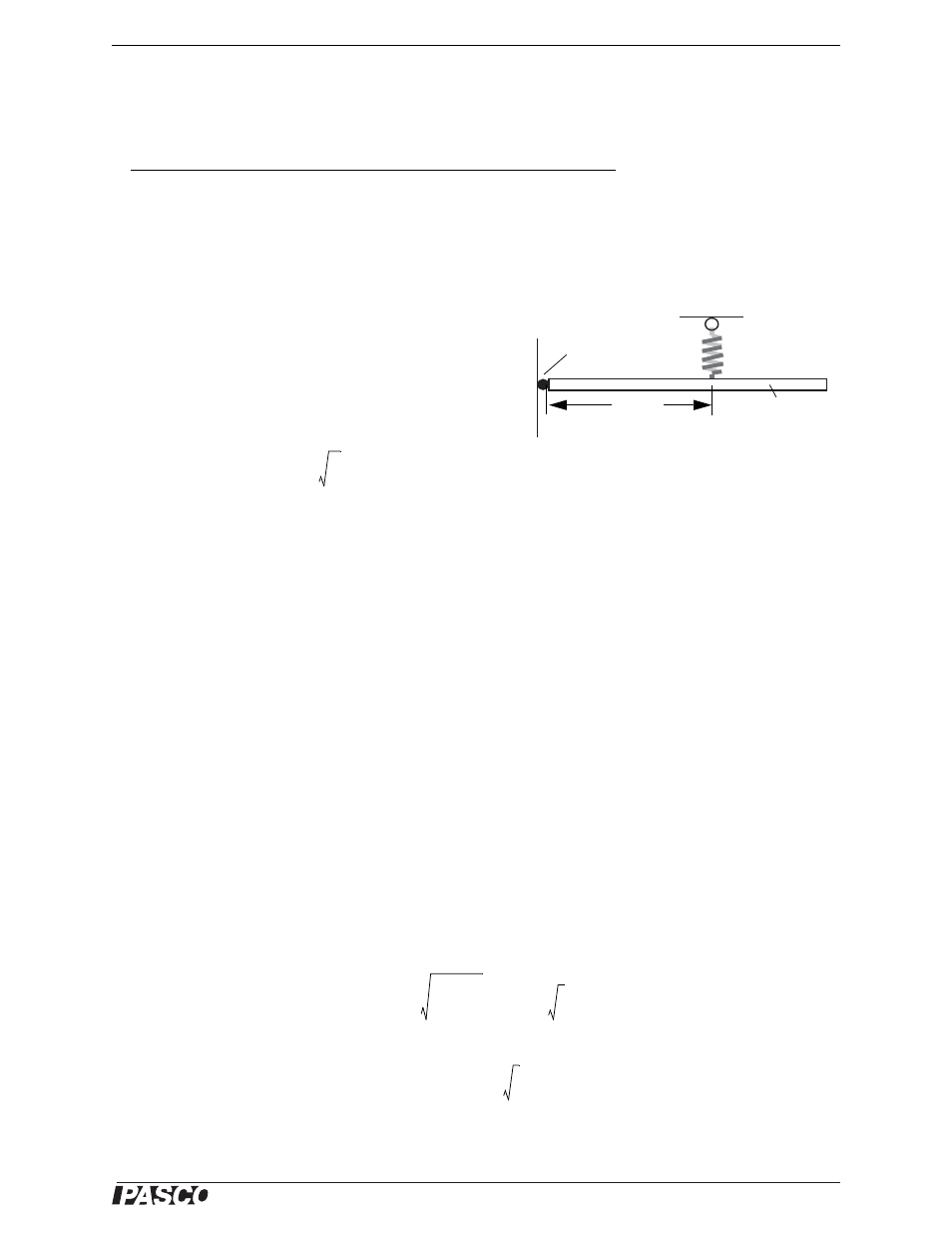
Imagine a horizontal beam that is supported by a hinge at one
end and a vertical spring at the other end. If the beam is dis-
place, the spring exerts a restoring force, F = -kx, to return the
beam to its equilibrium position. The beam will oscillate up
and down with a period, T
beam
.
For a mass on a spring, the period, T, is as follows:
where M is the oscillating mass and k is the spring constant. What is the period for a beam on a spring?
The beam rotates at the hinge as the spring oscillates up and down. The force of the spring on the beam, F = -kx,
produces a torque on the beam. Let L
lever
be the length of the lever arm of the beam. The torque due to the spring
is
= FL
lever
. A net torque causes angular acceleration,
, that is directly proportional to the torque, , and
inversely proportional to the moment of inertia, I. That is,
or
= I. Setting the two expressions for torque equal to each other gives FL
lever
=
I or -kxL
lever
=
I where x is
the displacement of the spring up and down as it oscillates.
The angular acceleration,
, and the tangential (linear) acceleration, a
T
, of the beam are related. The tangential
acceleration, a
T
=
r where r is the radius of rotation. In this case, the radius of rotation is the lever arm, L
lever
, so
a
T
=
L
lever
, or
= a
T
/L
lever
.The expression becomes:
Solving for a
T
gives:
This expression has the form of a
T
=
2
x, where
is the angular frequency, so is:
Since the angular frequency,
= 2/T, the period, T = 2/or
Item
Item
Statics Board
Mounted Spring Scale
Mass and Hanger Set
Balance Arm and Protractor
Stopwatch (ME-1234)
Thread
Hinge
Beam
Spring
L
lever
Figure 11.3: Beam on a Spring
T
M
k
-----
=
I
--
=
kxL
lever
–
a
T
L
lever
--------------I
=
a
T
kL
lever
2
I
--------------------x
=
kL
lever
2
I
--------------------
L
lever
k
I
--
=
=
T
2
L
lever
-------------- I
k
--
=