Exp. 6: torque-non-parallel forces, Theory, Setup – PASCO ME-9502 Statics System User Manual
Page 37: Exp. 6: torque—non-parallel forces
®
M o d e l N o . M E - 9 5 0 2
E x p . 6 : T o r q u e — N o n - P a r a l l e l F o r c e s
0 1 2 - 1 2 8 7 6 B
33
Exp. 6: Torque—Non-Parallel Forces
Equipment Needed
Theory
In a previous experiment, you investigated torques
appled to the Balance Arm and discovered that when
the torques about the point of rotation are balanced, the
beam remains balanced. All the forces in that experi-
ment were perpendicular to the beam and parallel to
each other. What happens when one or more of the
forces is not perpendicular to the beam?
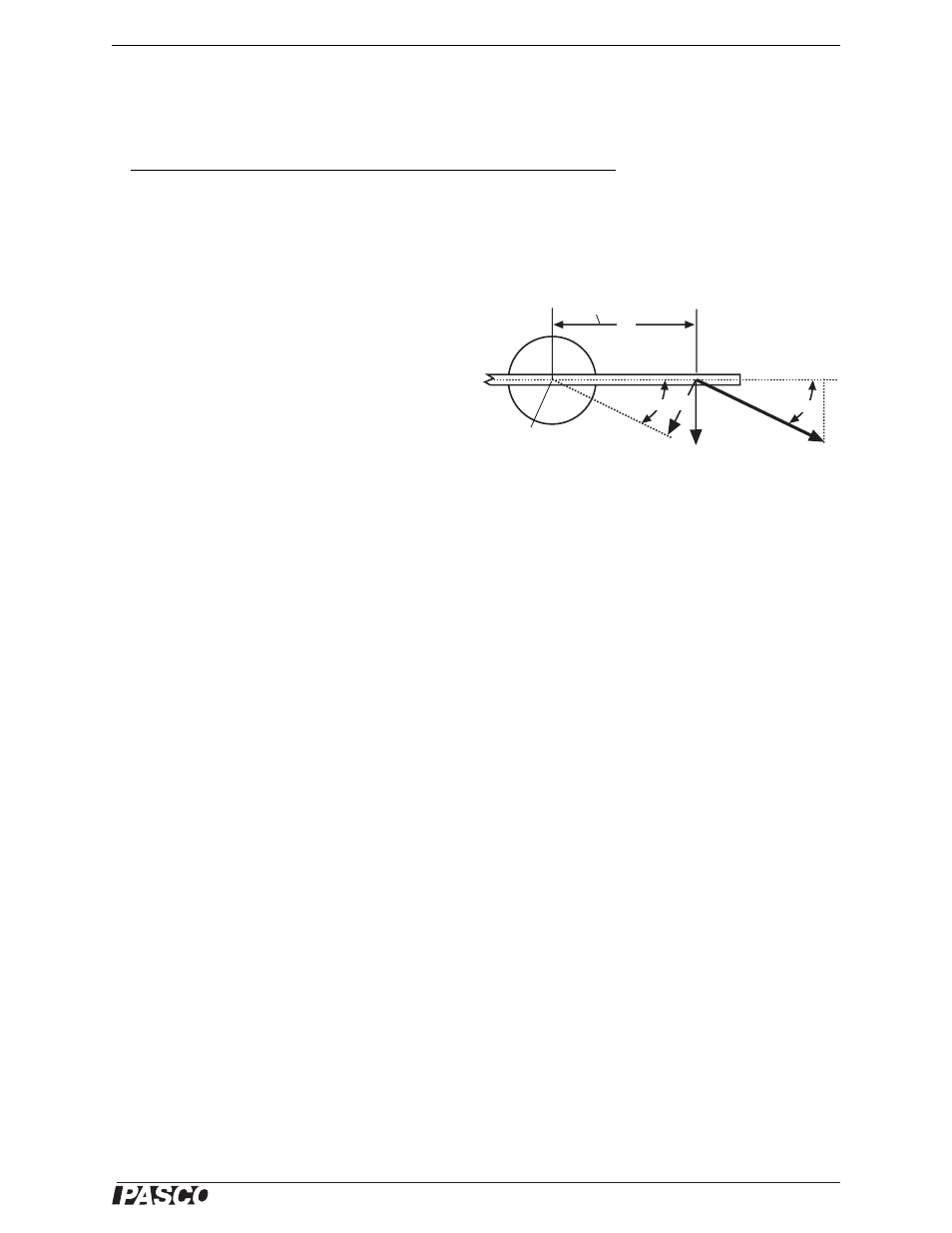
It turns out that the formula for torque can be general-
ized to account for this case. Torque is the cross product of the force vector and the lever arm where the lever arm
is the distance from the pivot point to where the force is applied. The generalized formula is:
where F is the magnitude of the force vector, d is the distance from the pivot point to the point at which the force
is applied (that is, the “lever arm”), and
is the angle between the force vector, F, and the lever arm, d. Note that
F sin
is F
, the component of the force vector, F, that is perpendicular to the lever arm, d. Note also that d sin
is d
the component of the lever arm, d, that is perpendicular to the force vector, F. In other words, d sin
is the
perpendicular distance, d
, from the pivot point to the line of force.
Setup
Mount the Balance Arm on the left half of the Statics Board. Adjust the beam so that the zero marks on the beam
align with the indicator marks on the pivot.
Put a protractor on each end of the beam (for example, between 130 and 140 mm from the pivot). Adjust the posi-
tion of the protractors if necessary so that the beam is balanced and level.
Item
Item
Statics Board
Balance Arm and Protractors
Pulley
Mounted Spring Scale
Mass and Hanger Set
Thread
Figure 6.1: Torque
F
d
F
Pivot
point
Lever
arm
d
Fd
sin
=