Yaskawa i80M Maintenance Manual User Manual
Page 127
4.3.7 MANUAL ZERO RETURN OPERATION FAULTY
This chapter assumes that manual feed (JOG ) and manual
rapid traverse rate (RAPID) operate normally.
Table 4.36
Manual Zero Return Operation Faulty
Cause of Trouble
Mode not set to zero
return
Rapid or jog mode not
selected
Deceleration limit
not input
Parameter not set
correctly
A dog position for the
deceleration limit
is arranged adequately.
Others:
●
Coupling loose
●
Dog loose
●
Noise
Check Method
/0 signal #3007 Do must be 1. (In i80L
nulti-program system, #3057 D
o
for second
and #3067 Do for third program. )
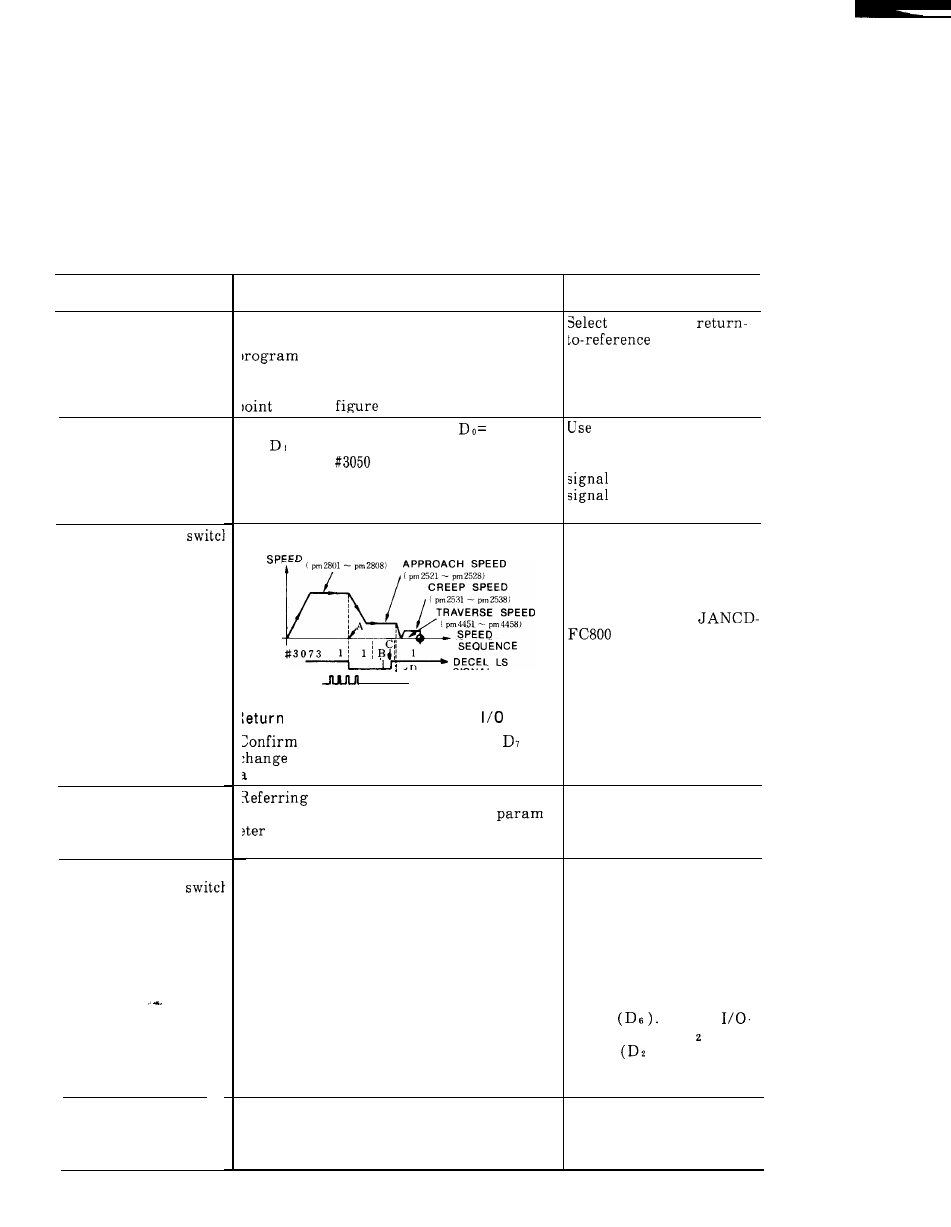
characteristically, the signal runs to
OT at
he existing speed even when it has passed
A in the
shown below.
n parallel with 1/0 signal #3007
1, #3000
)0
or
must be 1. In i80L multi-program
ystem, check
for second program and
“3060 for third program. Unless this condition
s satisfied, the operation cannot start.
RAPID FEED
#3o73
1
o
DECEL LS
SIGNAL
--- ZERO POINT PULSE
to Reference Point Control
Signal:
that 1/0 signals #3073
D
O
to
as above, transmitting 1/0 signals at
low speed such as jog, etc.
to the above figure, verify the
-elative parameter with the attached
-
sheet.
occasionally dislocation may occur by one
-otation of the motor.
This is a case in which the position is slipped
at random.
Shielded cable used for PG signal?
Solution
the manual
point mode or
the relative switch.
Check the wiring.
a
sequence change, etc.
to
enable the manual
return-to-reference point
and JOG or RAPID
to be input
simultaneously.
Check the deceleration
limit switch to check
the wiring. If both the
deceleration limit switch
and wiring are normal,
replace the model
board.
If the parameter is
different from the finally
set value of the parameter
sheet, reset it.
Arrange the dog position
to make the rising point
(point C in the above
figure ) of the deceleration
limit switch signal come to
the center of points
B through D of origin
pulses [In i80M, 1/0
monitor #3610 (D
6 )
to
#3614
In i80L,
monitor #3620 (D ) to
#3627
).] of each axis,
sending the signal in
handle mode.
If loose, tighten. Check
the shield processing and
contact your YASKAWA
representative.
a
A
119