Kipp&Zonen BSRN Scientific Solar Monitoring System User Manual
Page 55
43
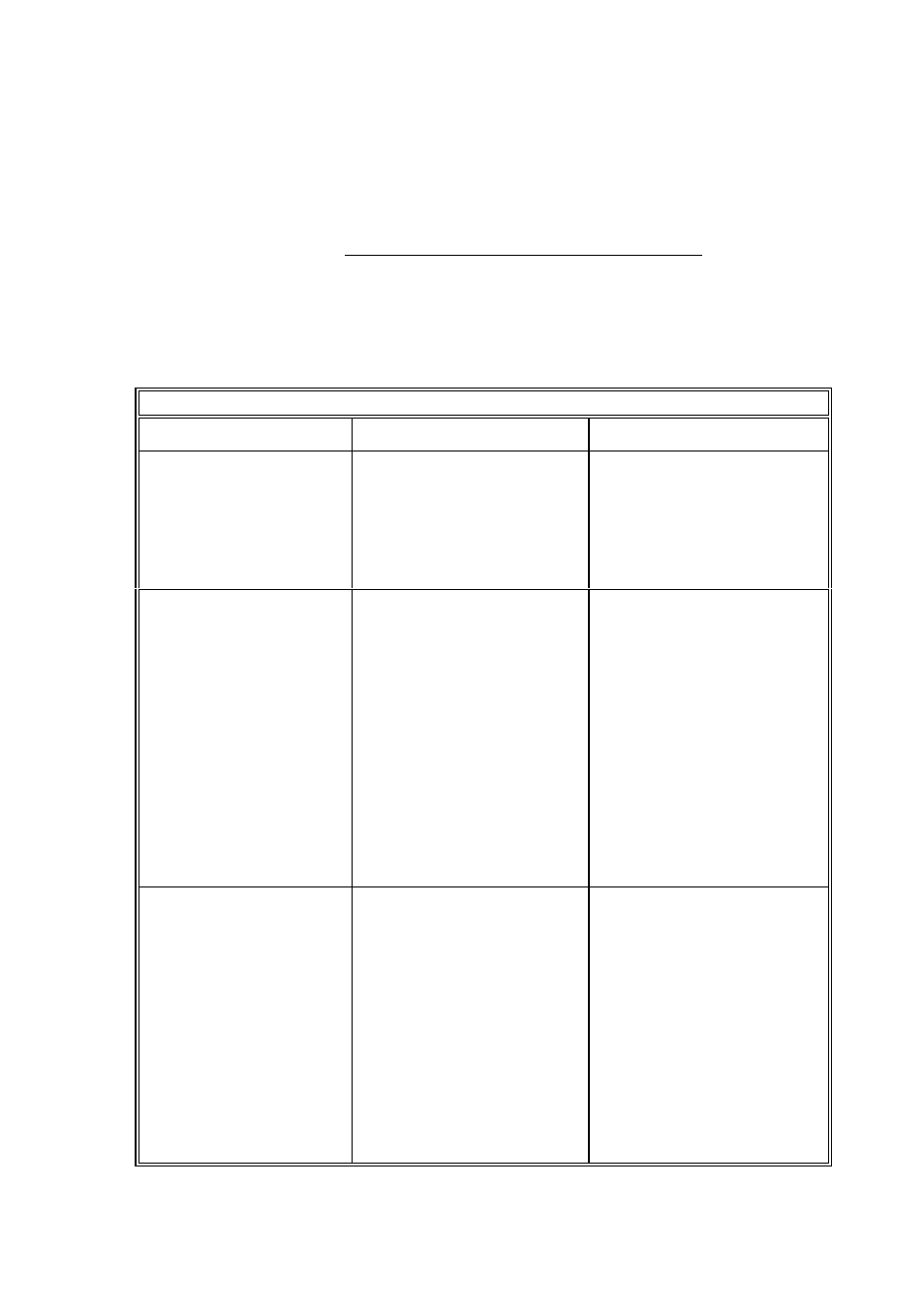
Types of Solar Pointing Devices Used in the BSRN
Tracker Type
Advantages
Disadvantages
Synchronous Motor
(Equatorial Mount)
Figure 4.8
- least expensive
- self-contained
- very portable (light weight)
- easiest m aintenance
- single axis requires adjustm ent
for solar declination
- pyrheliom eter wiring m ust be
untangled every few days
- accuracy dependent upon
quality of the power line
frequency
Two-axis Passive
(algorithm controlled)
Figure 4.6
- follows solar disk by
translating accurate solar
position algorithm s into stepper
m otor control functions (using
either an internal or external
CPU)
- usually has larger payload
than synchronous m otor
trackers
- does not require untangling of
cables
- m ay be able to attach an
unshaded pyranom eter on the
azim uth axis to reduce the
azim uth uncertainty
- requires accurate clock for
accurate solar tracking
- m ore expensive than equatorial
m ount
- m ay require a separate
com puter control system to
operate
- pointing accuracy and
sm oothness of position
dependent upon stepper m otor
functions
Two-axis Active
(quadrant sensor controlled)
Figures 4.5 and 4.9
- sim ilar load capabilities to the
two-axis passive tracker
- active tracking device
overcom es problem s with clock
accuracy during line-of-sight
tracking (added accuracy over
algorithm control)
- m ost reliable accurate tracking
- m ay be able to attach an
unshaded pyranom eter on the
azim uth axis to reduce the
azim uth uncertainty
- expensive
- active tracking eye m ust be
calibrated to ensure proper
tracking in com plex sky
conditions
- m ay require a separate
com puter control system to
operate
- requires accurate clock during
cloudy conditions to m aintain
accurate solar tracking
- pointing accuracy and
sm oothness of position
dependent upon stepper m otor
functions
Table 4.2. Advantages and disadvantages of com m on solar tracking instrum ents.
on an unlevelled tracker.
(4)
The tracker needs to be aligned in the north-south direction. Depending on the type of tracker
the accuracy of this alignm ent varies. Equatorial trackers need to be precisely aligned, while
m ost two-axes passive and active trackers have correction algorithm s built into the software
to allow alignm ent to be less precise. However, the greater the accuracy in aligning the tracker,
the easier it will be to initiate accurate tracking. The easiest m anner of obtaining a north-south
line is to trace the shadow of a perpendicular object at solar noon. Several internet sites are
now available that provide such tim es upon entering the date and the station latitude and
longitude (e.g
Details on the actual program m ing and set-up of individual features of the various types of trackers
is beyond the scope of this m anual and the reader is referred to the technical m anuals provided by
the m anufacturers (Annex E provides a list of m anufacturers of solar trackers).
Routine m aintenance of solar trackers is can be found in Chapter 6.