Ecu limitations, The dgc-2020 solution, Figure 4-12. bestcomsplus canbus setup -11 – Winco DGC-2020 User Manual
Page 61
9400200990 Rev B
DGC-2020 BESTCOMSPlus Software
4-11
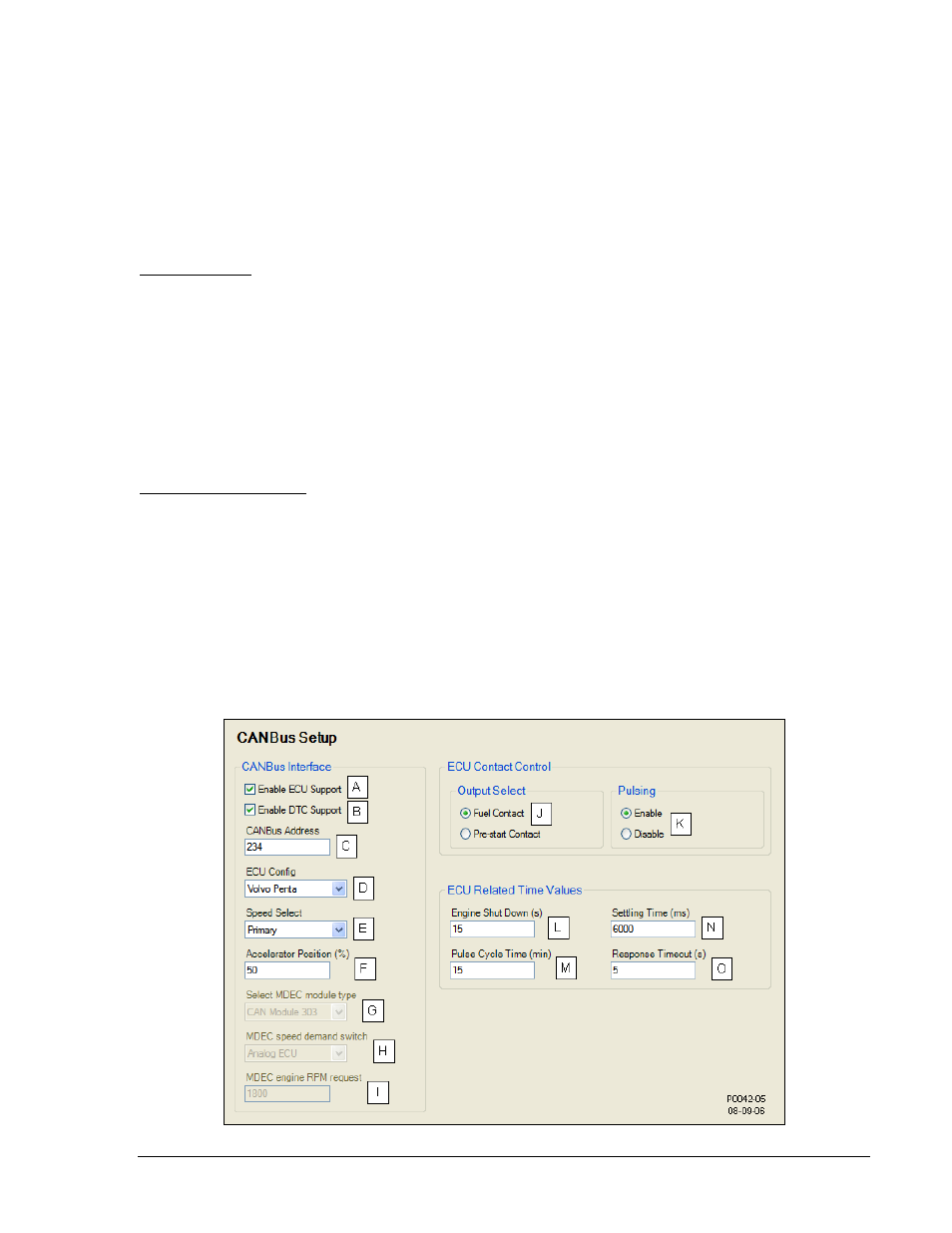
Frequency, or No CAN Demand. The MDEC engine RPM request setting
defines the rated rpm for the
engine.
In applications where the ECU is not continuously powered, the DGC-2020 has provisions for applying
power to the ECU and pulsing the ECU to update its engine monitoring data. Either the DGC-2020 Fuel
Solenoid or Pre-Start relay output can be used to apply power to the ECU
. If the Pre-Start contact is
selected, the Fuel Solenoid output will still close during cranking and genset operation to provide a
separate indication that the genset is running. For applications where pulsing of the ECU is not desired,
this pulsing feature
may be disabled.
∗The Volvo Penta ECU configuration is applicable only to the EDC3 and EMS2 models of Volvo Penta
engine controllers.
ECU Limitations
For some ECUs, an external source cannot stop the engine without removing power from the ECU.
Turning off power to the ECU is the only way to remove fuel from the engine and shut it down. Different
ECU manufacturers have their own rpm setpoints for reapplying fuel to an engine. If the ECU is powered
up and the engine is still spinning above 60 rpm, then the ECU will automatically turn the fuel on. Detroit
Diesel J1939 ECUs, for example, have a setpoint of 60 rpm.
Not being able to stop the engine without removing ECU power causes two problems. The first problem is
that the only way to stop the engine is to turn the ECU off and wait for the engine speed to decrease
below 60 rpm before powering the ECU back on. Otherwise, the engine will take off running. The second
problem is that while the ECU is off, you can no longer meter and update coolant level, coolant
temperature alarm/pre-alarm, and crank control.
The DGC-2020 Solution
The DGC-2020 resolves ECU limitations by using four timers:
• Engine Shutdown.
The time in seconds to stay disconnected from the ECU when going from running
to shutdown before starting the first pulse. This timer should allow enough time for the engine to slow
down so that when the DGC-2020 pulses, the ECU will not start the engine.
• Pulse Cycle Time.
The time in minutes the controller waits before pulsing.
• Settling Time.
The time in tenths of seconds to gather data after connecting to the ECU during the
pulsing state. This allows all the metered values to be sent and ramp as designated by the J1939
protocol. ECU values initially sent are low and the ECU takes time to average out its own data values.
• Response Timeout.
The time in seconds to attempt communication with the ECU when the DGC-
2020 is in the pulsing state or connecting state.
Figure 4-12. BESTCOMSPlus CANBus Setup