2 closed control loop with subordinate control, Closed control loop with subordinate control, 6 special device functions – JUMO 709062 TYA 202 - Three-Phase Power Controller Operating Manual User Manual
Page 78
6 Special device functions
76
2012-12-31/00561073 [SCR power switch TYA202]
Disadvantage:
A continuing constant temperature is no longer assured.
The power controller recognizes the deviation through the relatively slow re-
sponse of the temperature control loop and increases its output level (y
R
) until
the furnace reaches the original temperature (250 °C) again.
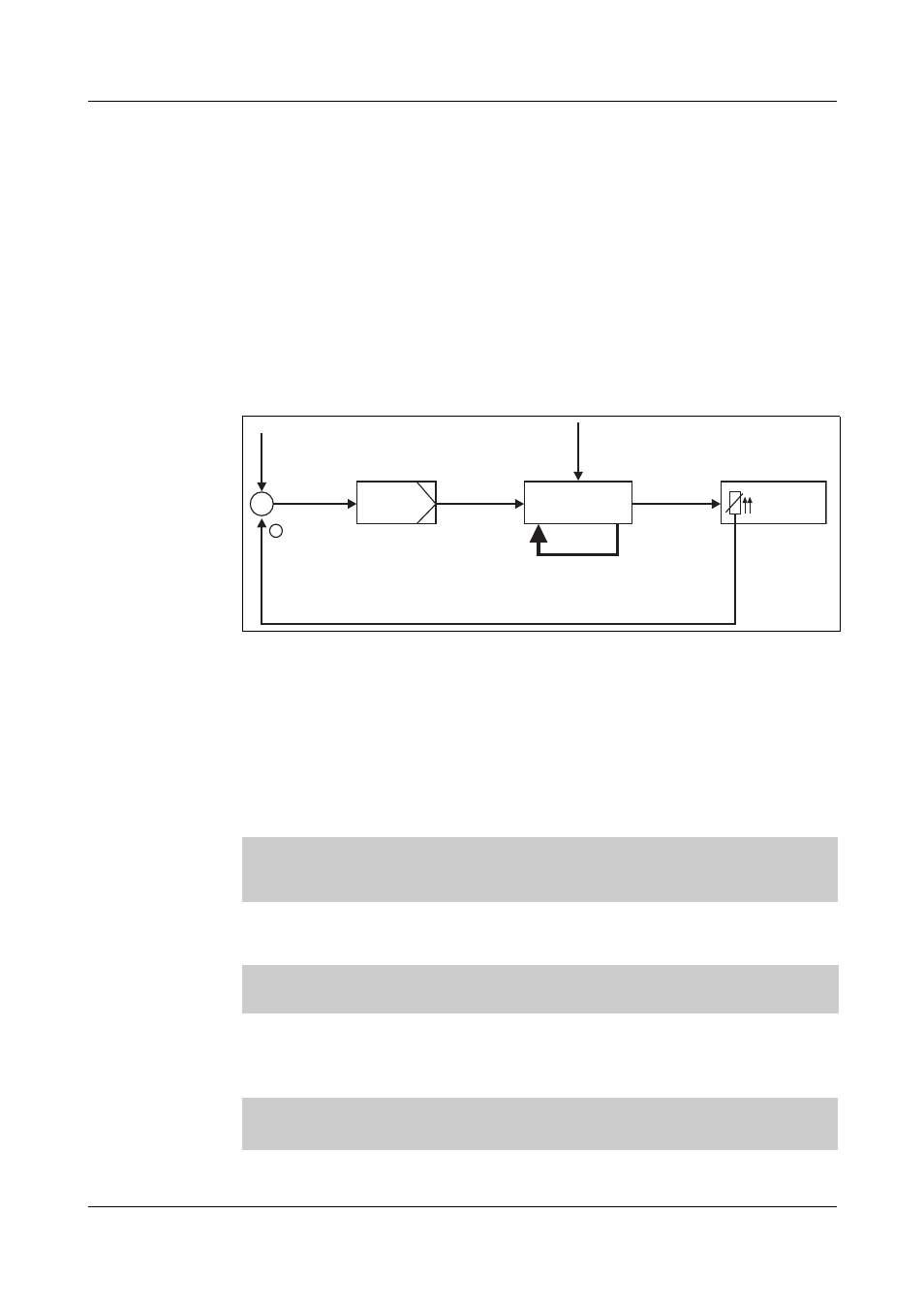
6.5.2 Closed control loop with subordinate control
To avoid power variations caused by supply voltage fluctuations, a subordi-
nate control loop is built into the power controllers. The subordinate control
loop immediately counterbalances any fluctuations in the amount of supplied
power. This means that the power controller always provides a power level at
the output (y) that is proportional to its input signal (yR). The principle of an
subordinate control loop is shown in Figure .
A distinction is made between U
2
, I
2
, and P control loops. U
2
control is used in
most applications. There are, however, some applications where an I
2
or P
control has advantageous control-loop characteristics (requires recording of
the current in the power controller).
The three different types of subordinate control are described in the following
chapters.
U
2
control
Considering the power P
load
in a resistive load, we know that it is determined
by the voltage on the load, U
load
and the resistance of load, R, as follows:
Equation 3 shows that, for a constant load resistance, the power in this resis-
tance is proportional to U
load
2
.
A power controller with a U
2
control will regulate in such a manner that the
square of the load voltage is proportional to the signal input (e.g. 0 to 20 mA)
to the controller.
Combining equations 5 and 4, we can see that the power in the load resis-
Controller
Sensor
Controlled
system
SCR
power controller
Voltage supply
subordinate
control loop
y
R
x
y
w
-
P
load
U
load
2
R
-------------
=
(3)
P
load
U
load
2
∼
(4)
U
load
2
input signal of the power controller
∼
(5)