IAI America SEL-TG User Manual
Page 165
10. Position Edit
147
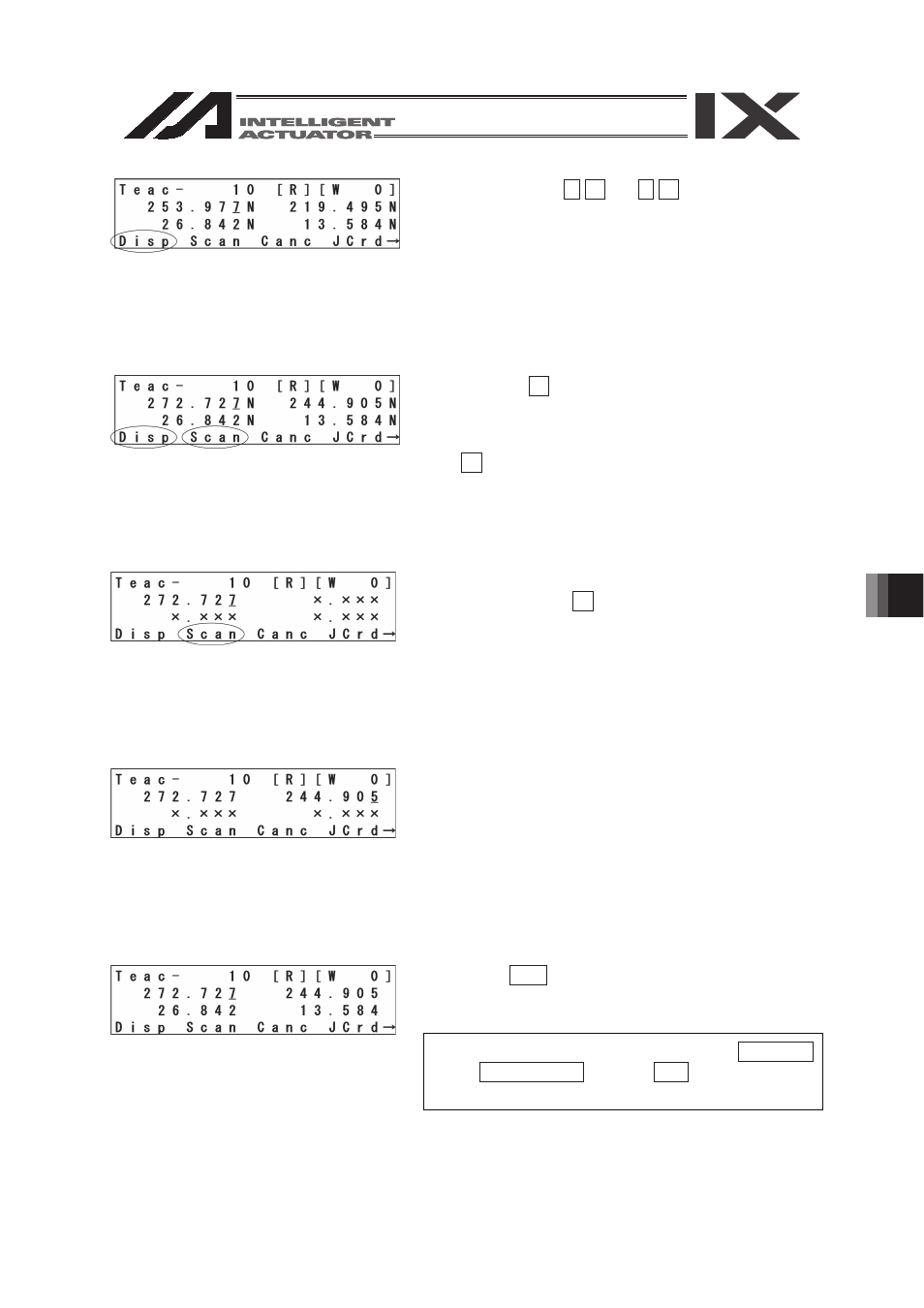
Press the jog key 1- 1+
䌾 4- 4+ to move the robot
to any given position.
Pressing the F2 (Scan) key incorporates the current
position of the axis No. over which the cursor is
located onto the input screen.
Change the screen over to the data input screen with
the F1 (Disp) key. Confirm that the data has been
incorporated.
The current position data cannot be taken in
(scanned) when the jog coordinate system is each
D[LVV\VWHP³$´GLVSOD\
Press the return key to move the cursor to the next
axis, and press the F2 (Scan) key.
Incorporate the data of the Z-axis and R-axis in the
same way.
Press the WRT key to transfer the position data to
the controller.
The position No. advances to 11.
:KHQ WKH VFUHHQ LV FKDQJHG ZLWK WKH 3$*( 83
DQG 3$*( '2:1 NH\V RU (6& NH\ EHIRUH GDWD
transfer, the input data becomes invalid.