Table 6-8 on – Adept i600 Cobra User Manual
Page 89
Installing Adjustable Hardstops
Adept Cobra i600/i800 Robot User’s Guide, Rev G
89
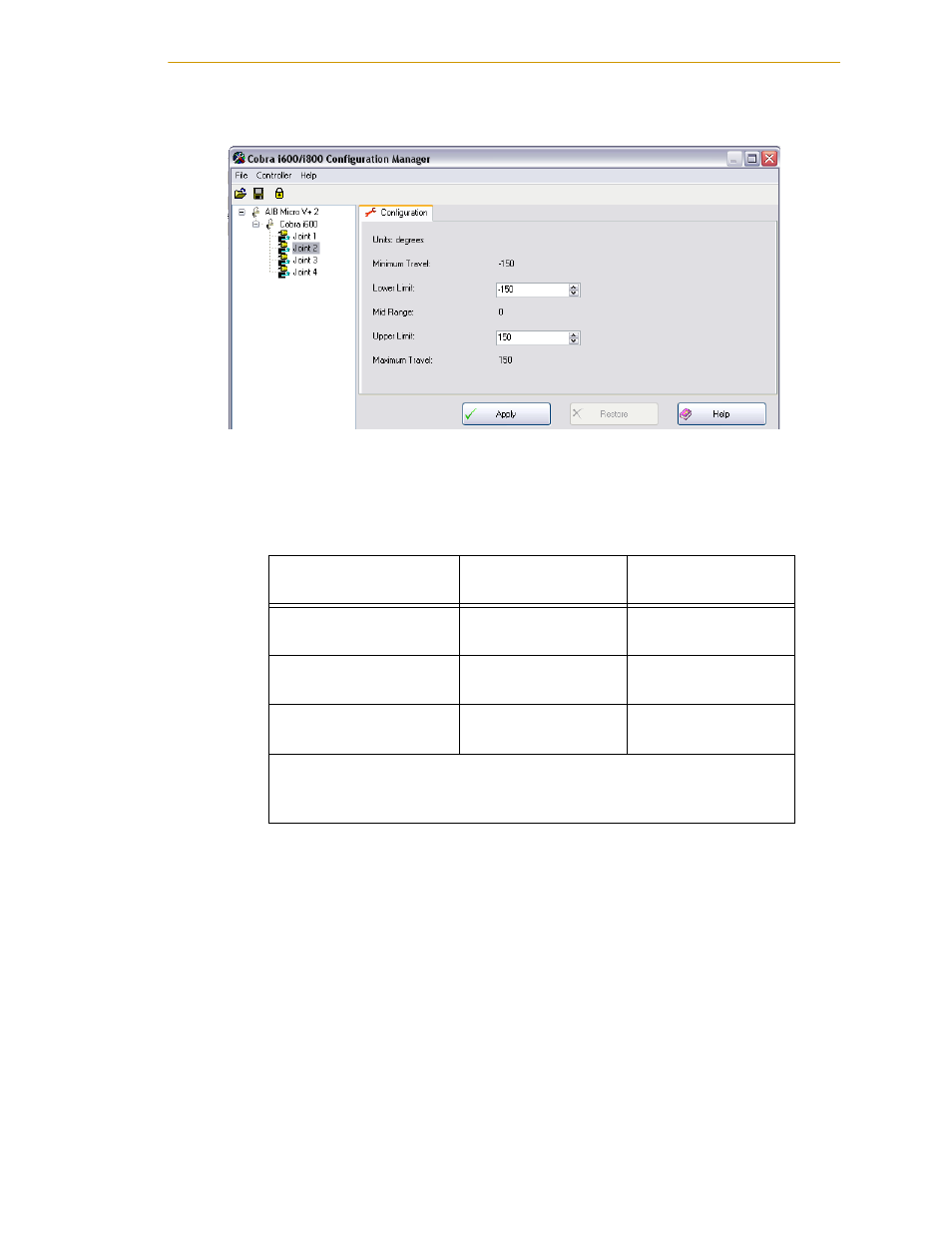
3. Click Joint 2. The following screen opens to allow editing the limits:
Figure 6-20. Configuration Manager - Modifying Joint 2 Limits
4. In the Lower Limit field, enter the new value for the J2 lower limit softstop. See
for recommended softstop values.
5. In the Upper Limit field, enter the new value for the J2 upper limit softstop. See
for recommended softstop values.
6. Click Apply. The Apply Changes window opens, as illustrated in
7. Select the required options for saving joint limit values to temporary or
permanent memory. For more information on saving changes, click Help
8. Click Write to apply and save the changes.
9. Once the joint limits have been changed and written to memory, the system is
ready to use with the new limits in place.
NOTE: With both adjustable hardstop plates installed, Joint 2 has a
maximum range of motion of 160°.
Table 6-8. Joint 2 Ranges for Adjustable Hardstops
Hardstop Value
Recommended Joint
Limit Softstop
J2 Hardstop Position 1
±
81°
Lower limit: – 80°
Upper limit: + 80°
J2 Hardstop Position 2
±
51°
Lower limit: – 50°
Upper limit: + 50°
J2 Hardstop Position 3
±
21°
Lower limit: – 20°
Upper limit: + 20°
NOTE
: J2 Hardstops can be installed in a number of positions, depending
on how the robot workcell needs to be configured. The positions are
spaced 30° apart.