Adept i600 Cobra User Manual
Page 100
Technical Specifications
100
Adept Cobra i600/i800 Robot User’s Guide, Rev G
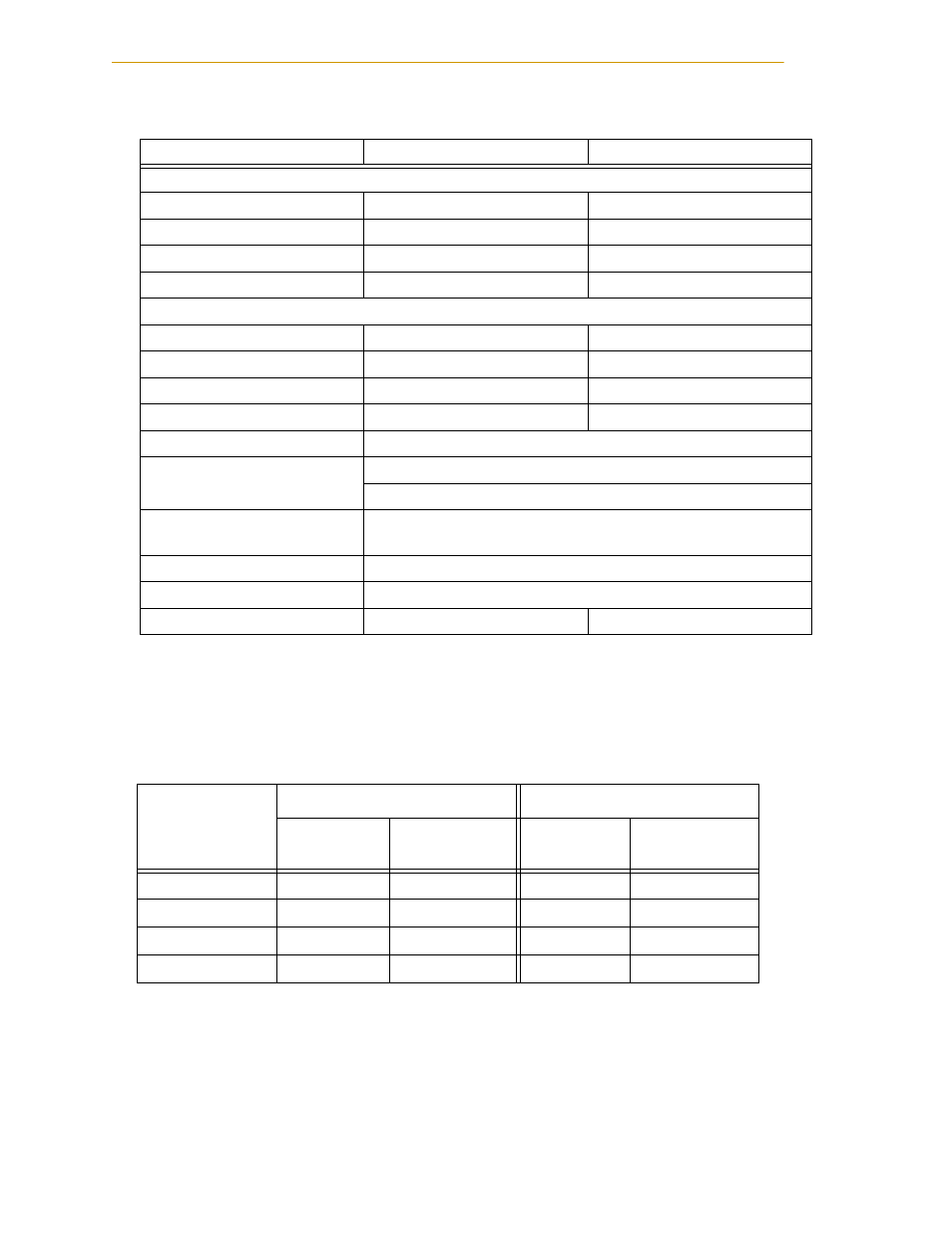
Joint Range
Joint 1
±105°
±105°
Joint 2
±150°
±157.5°
Joint 3
210 mm (8.3 in.)
210 mm (8.3 in.)
Joint 4
±360°
±360°
Joint Speed (maximum)
Joint 1
386°/sec
386°/sec
Joint 2
720°/sec
720°/sec
Joint 3
1,100 mm/sec (43 in./sec)
1,100 mm/sec (43 in./sec)
Joint 4
1200°/sec
1200°/sec
Encoder type
Absolute
Robot Brakes
Joints 1, 2, and 4: Dynamic
Joint 3: Electric
Airline pass-through
(quantity)
6 mm diameter (2), 4 mm diameter (3)
Electrical pass-through
24 conductors (12 twisted pair)
DeviceNet pass-through
One available
Weight (without options)
41 kg (90 lb)
43 kg (95 lb)
a
Specifications subject to change without notice.
b
The robot tool performs continuous path, straight-line motions 25 mm (1 in.) up, 305 mm (12 in.) over,
25 mm (1 in.) down, and back along the same path. COARSE is enabled and BREAKs are used at each
end location. Not achievable over all paths.
Table 7-2. Softstop and Hardstop Specifications
Joint
Cobra i600
Cobra i800
Softstop
Hardstop –
Approximate
Softstop
Hardstop –
Approximate
Joint 1
± 105°
± 108°
± 105°
± 108°
Joint 2
± 150°
± 151°
± 157.5°
± 160°
Joint 3
0 to 210 mm
-5 to 215 mm
0 to 210 mm
-5 to 215 mm
Joint 4
± 360°
not applicable
± 360°
not applicable
Table 7-1. Adept Cobra i600/i800 Robot Specifications
a
(Continued)
Description
i600 Robot
i800 Robot