7 installing adjustable hardstops, Joint 1 adjustable hardstops, Installation procedure – Adept i600 Cobra User Manual
Page 84: Figure 6-13. joint 1 adjustable hardstops
Optional Equipment Installation
84
Adept Cobra i600/i800 Robot User’s Guide, Rev G
6.7
Installing Adjustable Hardstops
Adept offers an adjustable hardstop kit for Joint 1 and Joint 2 on the Adept Cobra
i600/i800 robots. These are user-installed options that can be used to limit the work
envelope of the robot. The Adept part number for the kit is 02592-000.
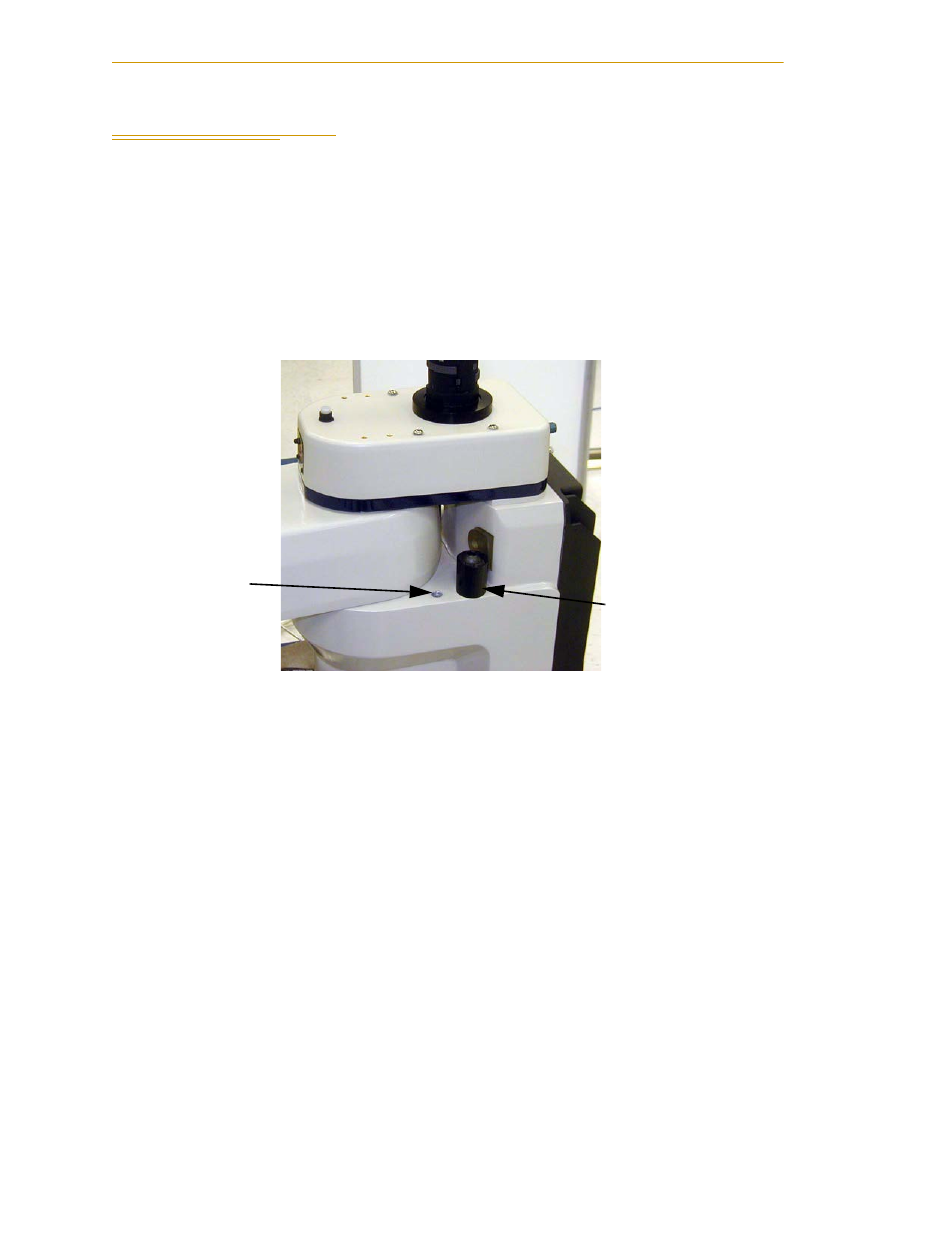
Joint 1 Adjustable Hardstops
The Joint 1 Adjustable Hardstops consist of two black rubber stop cylinders, and the
screws to install them. There are two locations for the hardstops on each side of the robot:
Position 1 and Position 2. See the following figure.
Figure 6-13. Joint 1 Adjustable Hardstops
Installation Procedure
1. Remove the plug from the desired threaded hole, Position 1 or 2, on each side of
the robot.
2. Install the adjustable hardstop into the threaded hole using an 8 mm Allen
wrench. Tighten to a torque of 5.1 N··m (45 in-lbf).
3. Repeat the process on the other side of the robot.
Modifying Joint Limit Softstop Locations for Joint 1
After installing the adjustable hardstops, you must modify the softstop locations using the
Configuration Manager utility. See the online help for more details on this utility.
1. Double-click the iCobra object in the Folder pane of the Workspace Explorer.
2. In the object editor, select Configure > Configuration Manager.
Joint 1 Adjustable
Hardstop
installed in
Position 2
Location for
Position 1