Internal user connector output specifications, Estop connector, Uts and – Adept i600 Cobra User Manual
Page 77: Table 6-4, For the outpu
User Connections on the Robot
Adept Cobra i600/i800 Robot User’s Guide, Rev G
77
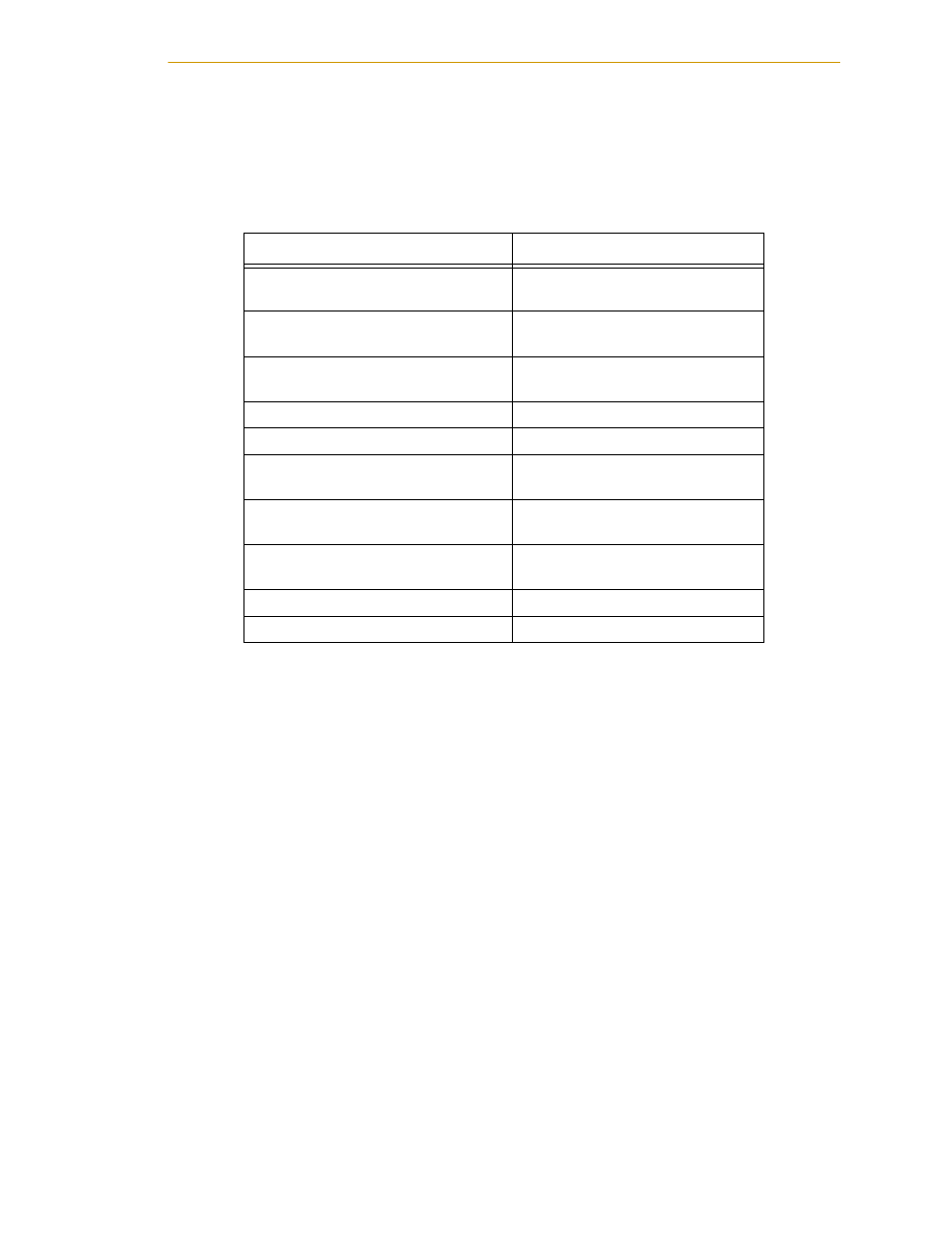
Internal User Connector Output Specifications
The output specifications in the following table apply to the EOAPWR, OP3/4, and
SOLND internal user connectors.
ESTOP Connector
This 2-pin connector provides a pair of contacts that can be used for a Breakaway E-Stop
function at the end of the arm. See
. The function is disabled by default when the
system is shipped. The user must enable this function using the Configuration Manager
(see below), and connect a normally-closed circuit to pins 1 and 2. When the circuit is
opened, the system will stop in an E-Stop condition. See
.
Table 6-4. Internal User Connector Output Circuit Specifications
Parameter
Value
Power supply voltage range
24 VDC (± 10%), 150 W (6 A)
(21.6 V< V
in
< 26.4 V)
Operational current range, per
channel
I
out
700 mA
Total Current Limitation, all channels
on.
a
a
NOTE
: Total current is the sum of the output current used by output
signals 3001-3004 (SOLND and OP3/4) and any user current drawn
from EOAPWR.
I
total
1.0 A @ 50° C ambient
I
total
1.5 A @ 25° C ambient
On-state resistance (I
out
= 0.5 A)
R
on
0.32
@85C
Output leakage current
I
out
25 µA
Turn-on response time
125 µsec. max., 80 µsec typical
(hardware only)
Turn-off response time
60 µsec. max., 28 µsec typical
(hardware only)
Output voltage at inductive load
turnoff (I
out
= 0.5 A, Load = 1 mH)
(+V - 65) V
demag
(+V - 45)
DC short circuit current limit
0.7 A I
LIM
2.5 A
Peak short circuit current
I
ovpk
4 A