Yaskawa Junma Series SERVOPACK User Manual
Page 59
5.8 Utility Functions
E-58
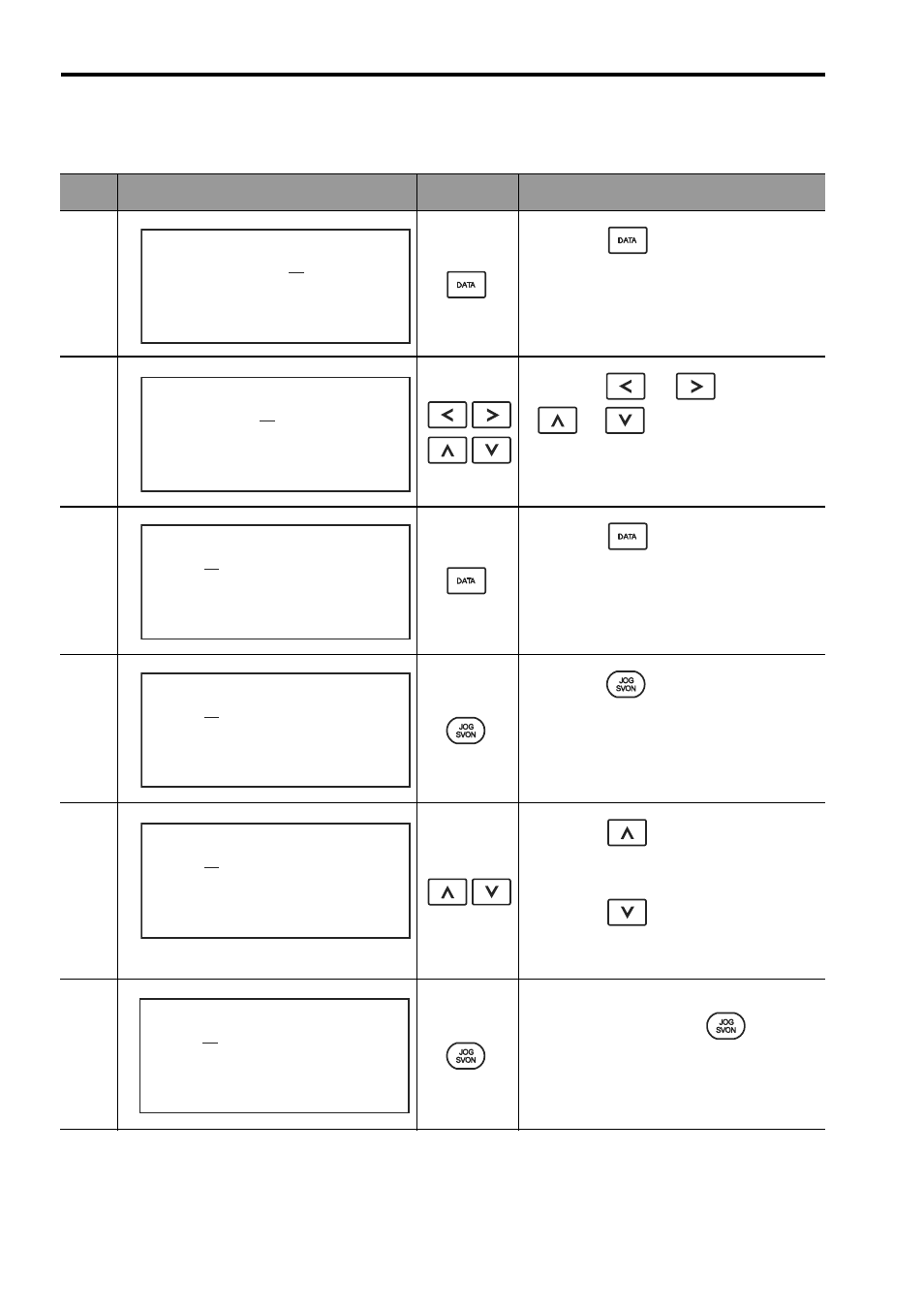
Step
Display after Operation
Keys
Operation
3
Press the
Key.
The cursor moves to the setting side (the
right side) of Pn304 (JOG mode
operation).
4
Press the
or
Key and the
or
Key to set the JOG
speed to 1000 min
-1
.
5
Press the
Key.
The setting value is entered, and the
cursor moves to the parameter number
side (the left side).
6
Press the
Key.
“RUN” is displayed in the status display,
and the servo turns ON.
7
Press the
Key to rotate the
servomotor at the speed 1000 min
-1
in
forward direction.
Press the
Key to rotate the
servomotor at the speed 1000 min
-1
in
reverse direction.
8
After having confirmed the correct motion
of servomotor, press the
Key.
“BB” is displayed in the status display,
and the servo turns OFF.
B B − J O G −
P n 3 0 4 = 0 0 5 0 0
U n 0 0 0 =
0
0 0 0 0 0
U n 0 0 2 =
0
0 0 0 0 0
U n 0 0 D =
0
0 0 0 0 0 0 0 0 0 0
B B − J O G −
P n 3 0 4 = 0 1 0 0 0
U n 0 0 0 =
0
0 0 0 0 0
U n 0 0 2 =
0
0 0 0 0 0
U n 0 0 D =
0
0 0 0 0 0 0 0 0 0 0
B B − J O G −
P n 3 0 4 = 0 1 0 0 0
U n 0 0 0 =
0
0 0 0 0 0
U n 0 0 2 =
0
0 0 0 0 0
U n 0 0 D =
0
0 0 0 0 0 0 0 0 0 0
R U N − J O G −
P n 3 0 4 = 0 1 0 0 0
U n 0 0 0 =
0
0 0 0 0 0
U n 0 0 2 =
0
0 0 0 0 0
U n 0 0 D =
0
0 0 0 0 0 0 0 0 0 0
R U N − J O G −
P n 3 0 4 = 0 1 0 0 0
U n 0 0 0 =
0
0 0 0 0 0
U n 0 0 2 =
0
0 0 0 0 0
U n 0 0 D =
0
0 0 0 0 0 0 0 0 0 0
B B − J O G −
P n 3 0 4 = 0 1 0 0 0
U n 0 0 0 =
0
0 0 0 0 0
U n 0 0 2 =
0
0 0 0 0 0
U n 0 0 D =
0
0 0 0 0 0 0 0 0 0 0